(When using a Mini 2/Mavic Air 2/Air 2S)
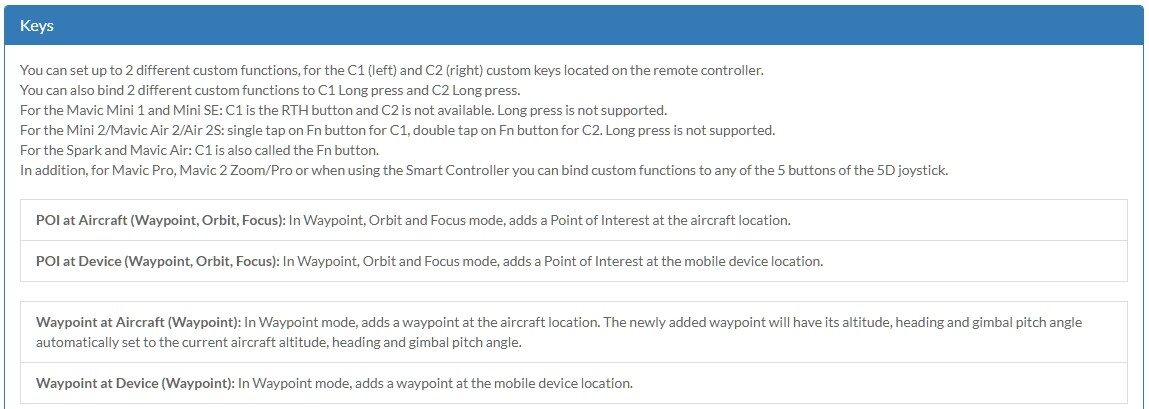
In the Litchi App set the function button (KEYS) of the remote controller to ‘Waypoint at Aircraft’.
In Waypoint Mode tap the onscreen Mission Setting button and set:
-Heading Mode to ‘Custom(WD)’
-Finish Action
-Path Mode
-Cruising Speed
-Default Gimbal Pitch Mode to ‘Interpolate’
-Rotation Direction to ‘Managed’
Now fly your drone manually to a point of your interest (not a POI) and aim (frame) the camera.
Press the Function button to create a waypoint.
This waypoint will include the position and direction of the drone AND the camera’s pitch angle (Gimbal Pitch).
Fly to the next location and do the same (up to a maximum of 99 waypoints).
(The 99 waypoints limit will be remove in Litchi v4.24)
When there is an obstacle between any of 2 waypoints of your interest, you have to include waypoints whilst flying around it.
When you’re done flying, save this created mission and run (fly) it.
You may possibly have to fine tune it either on your phone or in the mission hub.
Like:
In Mission Settings:
-Finish Action
-Path Mode
-Cruising Speed
In Waypoint settings:
-Speed
-Curve Size
-Actions
Advantages using this method:
-You can actually frame a subject realtime, no guessing of distance and camera angle.
-You are aware of any potential obstacles and deal with them.
-Most likely NO unexpected control signal loss trouble with VSC-drones.
I have used AirData to Litchi Converter a few times. Run the route you want and then download the CSV file from Airdata and drop it into AirData to Litchi Converter.
Having taken on board the advice and recommendations, I have to say that I am still a tad disappointed with the positional accuracy. I manually walked the M2 around my garden perimeter and, as discussed earlier, used the function button to set waypoints based on the aircraft position. Then I flew the route but found that the actual flight path was still a metre or two “out”. I had at least 21 satellites locked on. Given the number of GPS decimal places that are captured by the M2, I would have thought that accuracy would be better but also, looking at how a “fix” bounces around on the phone when using Litchi I suppose it’s a miracle that the accuracy is as good as it is! So, am I being unreasonable in seeking greater accuracy? I presume there are no calibration settings.
Just one other question, is it possible to replicate waypoint settings? It’s a bit of a pain, when you have a lot of waypoints to have to modify each one as you add them to the mission.
You can select multiple waypoints at once then change settings for all. To do this, select one waypoint then ctrl-select another waypoint. At that moment a pop up will appear allowing you to select all waypoints (if you choose). Then you can make changes for all selected waypoints.