I’ve been using a mini 3 pro with an RC Pro and Litchi Pilot for some photogrammetry missions. All went well.
I decided to upgrade the mini to a mavic 3 for better performance in strong winds. I made some missions on the new Hub and using the kmz swap method uploaded them to my controller.
Flew a test flight today with 140 waypoints/photos and all was well until the mission finished and the drone was supposed to return home. Instead it decided to start flying out to sea! I paused the mission and brought it back and resumed the mission again to see if it would land but it started going back out to sea.
Upon getting home and looking at the footage, I see an extra waypoint when the mission was being flown. No extra waypoint in the mission file though.
Maybe you accidentally tapped to make a point on the map on the RC? Was the kmz file you replaced originally near where you flew this mission or somewhere far away/random?
I’m using a Litchi Pilot (DJI Mini 2 drone) in manual flight mode. However, the camera display is just a blank black screen, while other functions remain normal, such as raising and lowering the gimbal.
I tried using a regular Litchi, and everything works normally.
Is this a bug with the DJI Mini 2 using Litchi Pilot?
A few weeks ago I had commented about having difficulty with area mapping missions using my RC Plus and M3C. I’ve had nothing but difficulties getting through a mission successfully, whether it be a 200+ point mission with overlap dialed down or a <100 point mission, my success rate is probably <10%. Most of the time the mission just refuses to do anything other than go to the first point, take a photo, then stop or make it halfway through and say that there’s an obstacle at a certain waypoint and refuses to continue, even if I start from that point. Is there any log I can look at to pinpoint the issue? Is there work being done to improve the area mapping feature? I bought this drone recently, somewhat exclusively to do area mapping, so I’m a bit frustrated with this.
You might want to try disabling obstacle avoidance during your mapping missions: the M3C often mistakenly detects obstacles and aborts the flight. Also, keep in mind that the M3C isn’t really designed for photogrammetry. If mapping is your primary use, the M3E would be a much better fit, but for now, disabling obstacle avoidance should at least improve your chances of success with the M3C.
I did try with it set to sports mode but made no difference with the warning. While I’m not strictly speaking doing surveying/photogrammetry, I’m doing gaussian splatting, which I’d like to be as accurate as possible but isn’t strictly necessary for what I’m trying to create. I do think I may have come up with a workaround that alleviates my issues though. I made a large area mapping mission that’s almost 900 points with it set to photo action, this mission basically doesn’t load at all, causes the app to crash, fans to max out, and can’t properly load a new mission until the drone is restarted. I switched the mission to video instead, which results in a massive reduction of waypoints (880 down to 80!), changed the 1st point to not start video, then started a 3 second photo interval, and worked perfectly! Obviously I’d love for the original method to work for me, but I can make do.
I’m in the same boat. Mavic 3 Classic, DJI RC Pro, photogrammetry missions. I too noticed larger mission will crash the app, so need to either hide the map view (use the compass view) or as you did, turn the mission to a video mission, remove the video recording on the first and last waypoint and set a interval photo.
What speed did you fly your mission with the 3s intervals?
I did 10m/s with a 2s interval, flying at 51m height at a -45 degree angle. With this workaround I’m still trying to find the balance of flight speed and photo interval.
In your footage, it shows the drone traveling to waypoint #141 at the end of the mission (with the drone still in waypoint mode). This strongly suggests that the 141st waypoint was added after you loaded your 140-waypoint mission.
Yes. Waypoint actions add a lot of code to the WPML data, making the KMZ file much larger. While the WPML language does support distance intervals, apparently, DJI has not implemented that function in their waypoint engine. If they did, distance intervals could be added to the WPML code just as they can be for flights flown with the Litchi app. For now, we seem to be constrained by the memory limitations of the flying device and partially supported WPML functions in the DJI waypoint implementation.
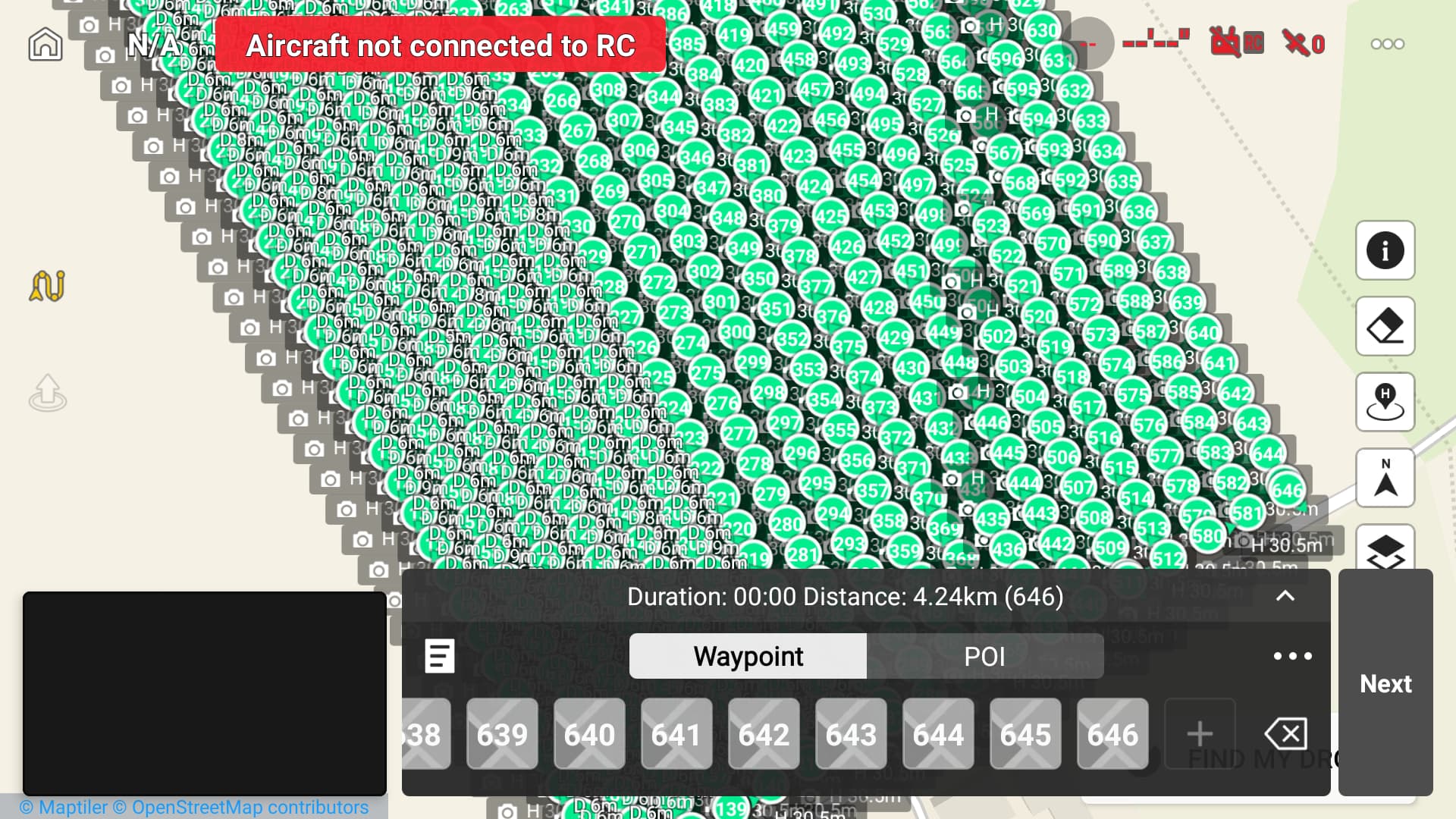
I just tried to look at my waypoint mission on my RC Pro, something I couldn’t do before and it opened. Sure enough there was a waypoint right out in the middle of the North Atlantic I must of somehow hit it.
Anyway, in other news I’d updated the Fly app yesterday and it seems that even waypoint missions with over 600 points are now opening and are pretty snappy in the map.
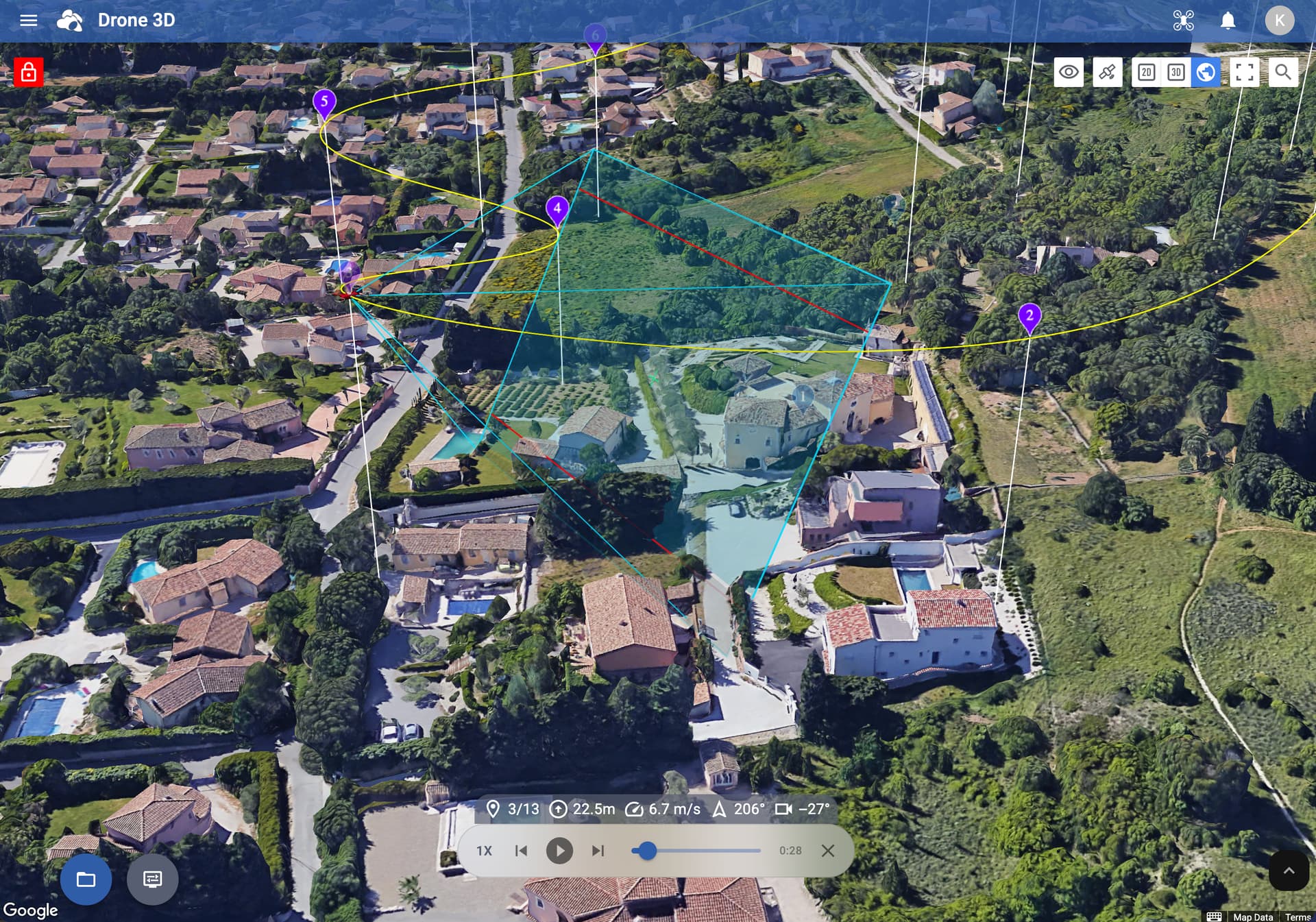
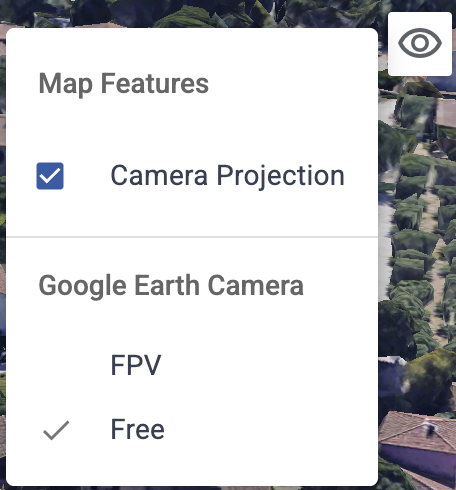
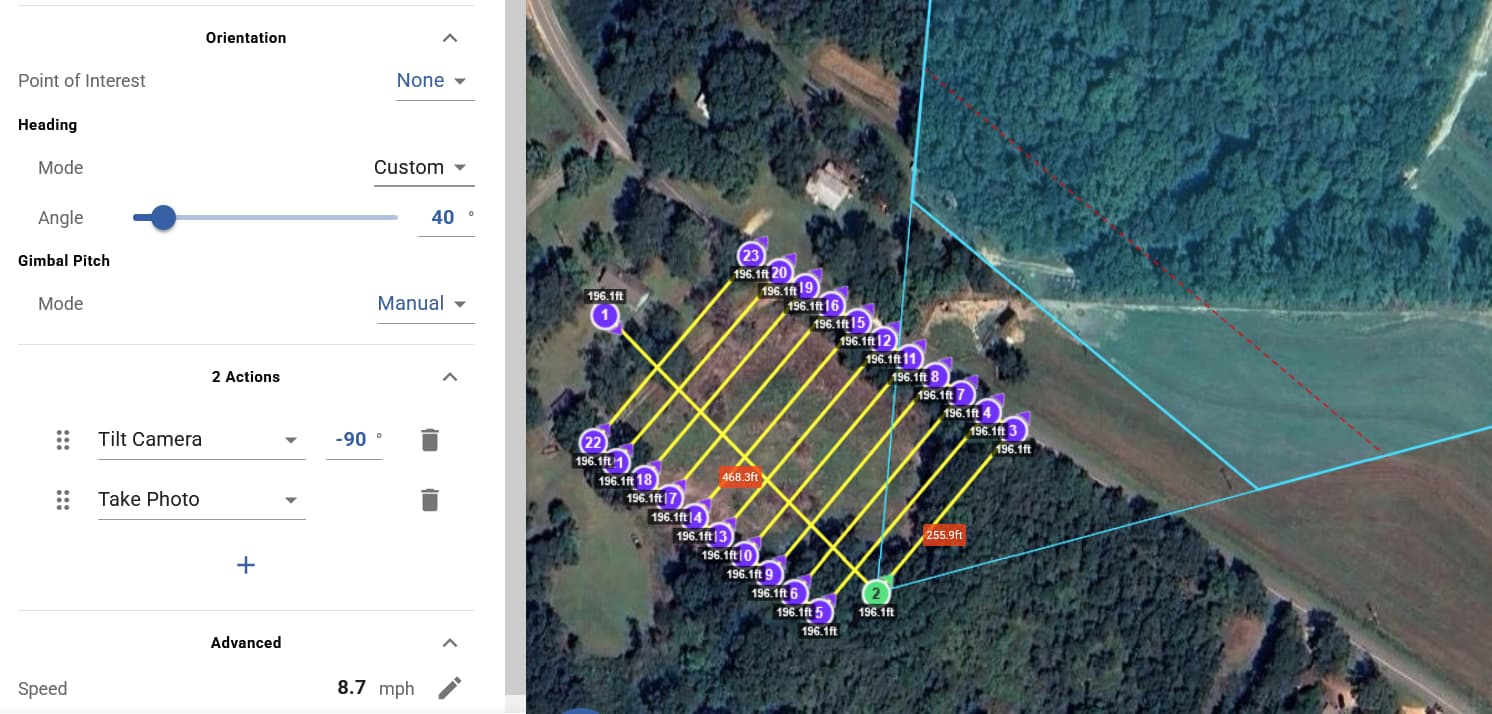
If the camera is tilted down -90° by waypoint action, should it still display the camera projection as if its facing forward? The projection simulation displays a forward facing view, even in 3D map view.
Hello Vico, when trying to import a KML file to plan the mission, we received a message saying that this feature will be available soon. I’m not sure if I’m doing something wrong. Anyway, I’m really enjoying it. This new version of the Mission Hub is amazing.