My area mapping mission configured for photos automatically switches to video mode and records. Phantom 4 Pro. I apologize if this drone series is documented somewhere as incompatible with mapping missions, but what am I doing wrong?
Take the KMZ file of this mission and unzip it. Open the “waylines.wpml” file and look at the “Action” block of the first waypoint. See if it includes a “Take Photo” action or a “Start Recording” action.
Or, send the file to me so that I can have a look.
Turn Off “Auto Record” in the Litchi App Settings.
3 Likes
I assumed adding “Gimbal Tilt” to whatever the user needs was required for all waypoints and so I have been implementing this setting for all my waypoints map missions. Do you recommend implementing this setting at the global window or wapoint 1? I hope I’m making sense.
My area mapping mission configured for photos automatically switches to video mode and records. Phantom 4 Pro
Turn Off “Auto Record” in the Litchi App Settings.
Ah yes - thank you very much. I feel dumb.
And @wesbarris - thank you for your input and willingness to help.
Normally, this is a perfectly acceptable thing to do. Most mapping mission generators would include this action. I was just trying to come up with ideas to decrease the size of your KMZ file. If the gimbal pitch is at -90 degrees for the first waypoint, it is probably go to remain at -90 degrees for the next waypoint. But it is normally safest to set it to -90 degrees for each waypoint.
Whether it is set as a waypoint parameter or a waypoint action makes little difference in the WPML code, so, it probably doesn’t matter.
Can you let us know the size (in KB) of the KMZ file being generated?
As a test, you could select all waypoints and remove all camera actions (tilt camera, take photo) or just set the mission to capture video instead and see if you can run the resulting mission. If it succeeds, it would indicate that the camera actions are what are causing the mission not to run.
I know that this may not help to get a full mission to run, but it would help to diagnose why the current mission is not running.
The options to upload a mapping area is great, but I cant seem to find a way to upload a DEM as you can in the mission hub. is that going to implemented or am I missing something?
Hello everyone!
I live here in Brazil and, after using several autonomous flight tools focused on mapping, I see that the “mapping” functionality has a great future, and will replace, in my case, the free “Grid Mission Designer” platform (ancient.land), where I believe this project should be stalled or abandoned, as many people, even here on the forum, complain about the lack of satellite imagery.
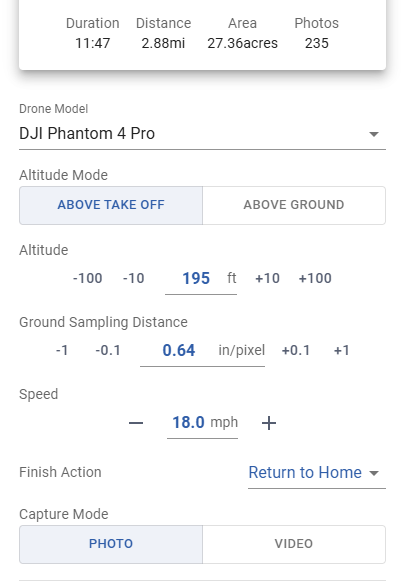
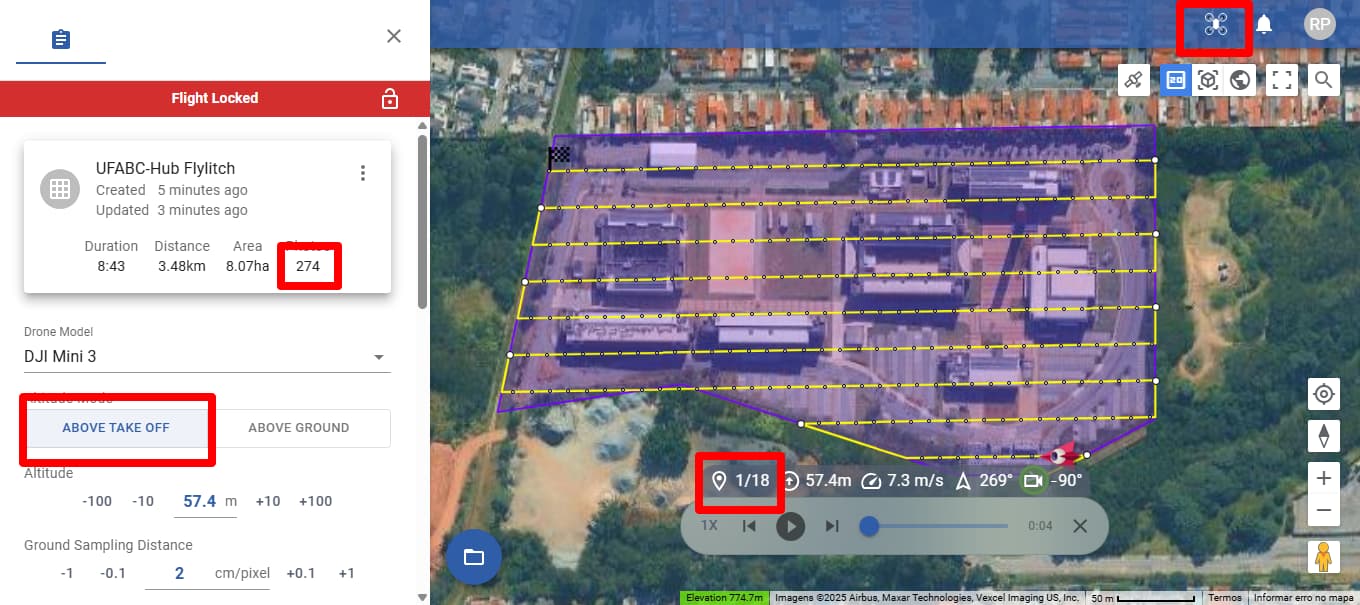
I haven’t yet field-tested the new Litchi Hib, as I noticed in the flight plan that it has some issues. I’ll post screenshots and share my impressions:
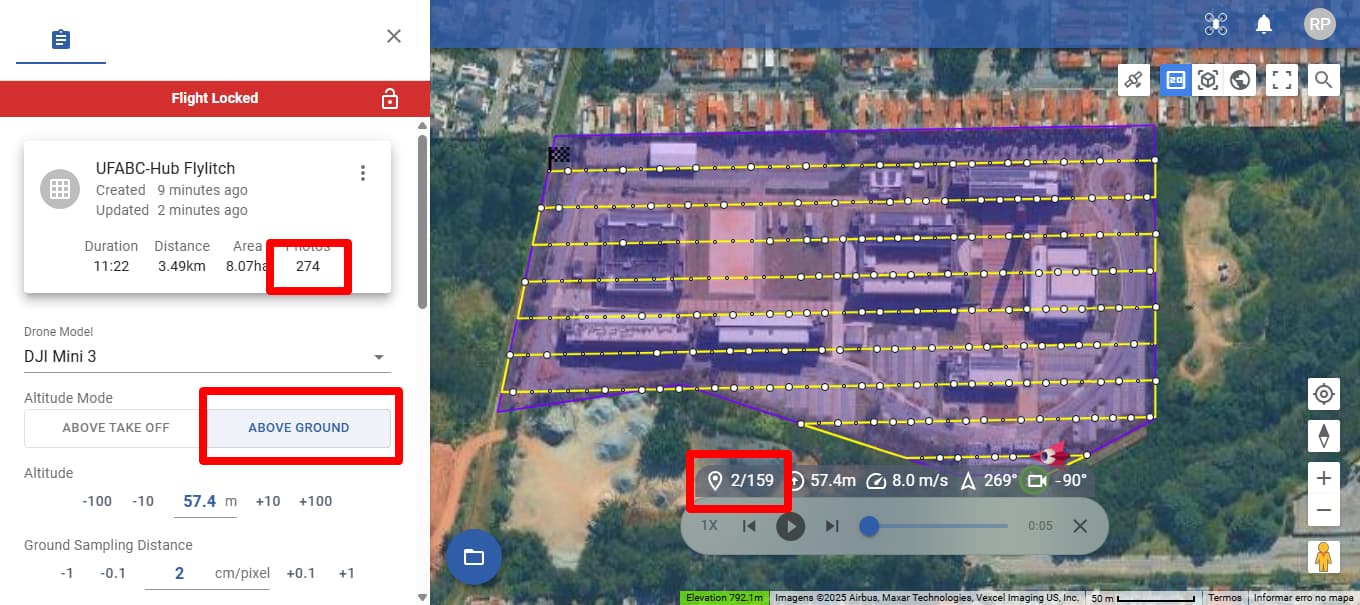
Using the “Above Take Off” option
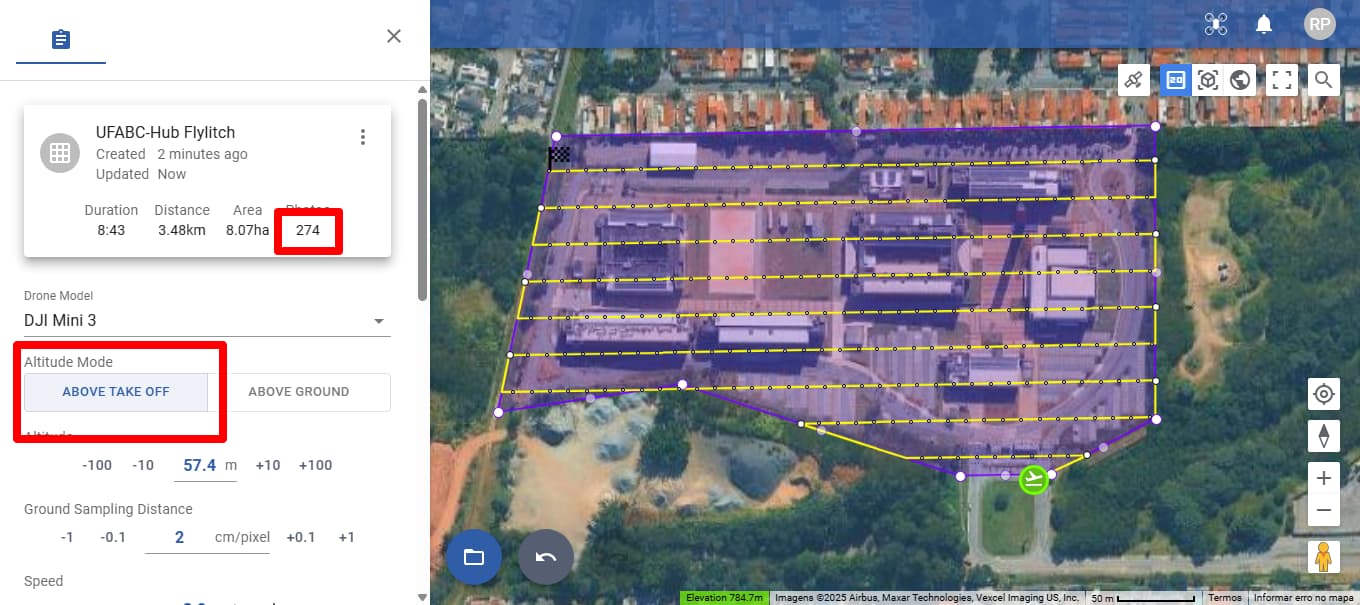
We noticed that 274 photos are planned, while in the simulation only 18. Am I confusing photos with the number of waypoints?
Using “Above Ground” option:
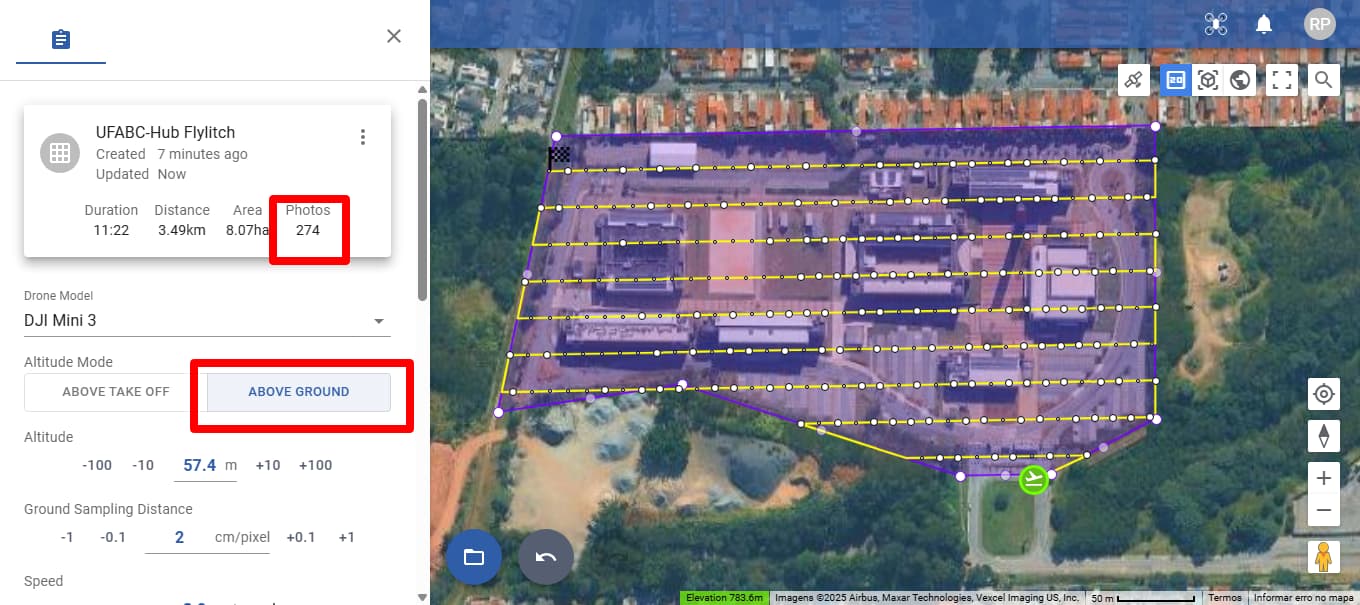
We also notice that 274 photos are planned, while in the simulation, 159. What I also notice is that it follows the terrain leveling, but there are large blank spots where the drone will skip capturing images. In this specific case:
These blank waypoints are evident when we export to Google Earth:
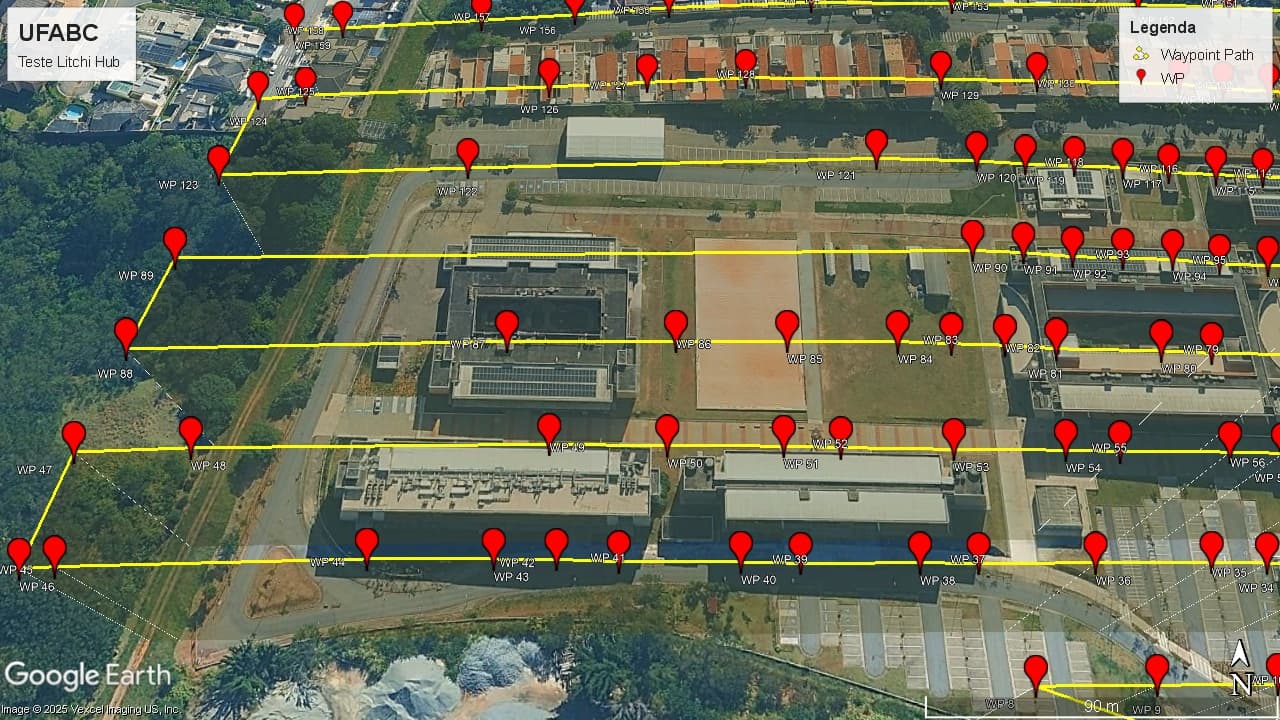
We noticed that there is no logical or uniform filling in the path, for example, the path from waypoint 89 to waypoint 90 is more than 189 meters!
In Android App (Litchi Pilot) in same issue. I will leave the link to this planning below for better understanding:
Best Regards!
Roberto P Junior
It is already implemented in Flight Library > + > Import
You are indeed confusing number of photos with number of waypoints. The drone will take multiple photos between waypoints where possible. The waypoints are placed where required to follow elevation changes. If the elevation does not change then no waypoint is needed.
1 Like
Thank you very much for the quick response. I will test it in the future and send you feedback when possible.
![]() Perfect, I see it now.
Perfect, I see it now.
I tested and works great to upload a DEM just as it did on mission hub, however when you create a new flight and select area mapping the waypoints created do not respect the DEM elevation, but if you choose a waypoint mission the way points do respect the DEM. I tested with a DEM of a site with drastic elevation changes (trees) and the waypoints all show ground elevation and not the DEM elevation.
I just received my modified RC Plus to replace my RC Pro for use with my M3C, so I decided to test the 200+ point area mapping mission that just wouldn’t work at all on the RC Pro. Unfortunately there’s no difference at all and still can’t execute a large mission. I’ll have to test a 200+ point waypoint mission instead of an area mapping mission to see if that’s the issue.
We’ve found one issue where the altitudes are not correctly saved if you import the DEM after planning your flight, we will fix that. Other than that it works fine in our testing and the DEM data is correctly taken into account when planning a mapping flight. Please give us detailed steps to reproduce the issue you are referring to.
Is it not possible when doing a mapping flight to duplicate a layer, so that you can change it’s altitude and gimbal angle, for example start off with a layer at 285 feet, and a gimbal angle of - 90, copy this, change the altitude on the duplicate layer to 185 feet, and gimbal angle to - 65, so then the drone will fly the 285 foot layer, then descend to 185 feet and fly that layer
You can duplicate the mission, then edit the parameters (altitude, orientation, gimbal pitch, etc) of the 2nd mission.
I do that quite often.
Yeah appreciate that one @Sam_G, I was thinking of keeping it all in one mission like you can in other mapping software
I see.
I like to have missions pre-planned, to make it easier (quicker) to load and fly.
When the CSV export becomes available, it will be easy to export and combine various mission types into one.
