Sorry, I somehow missed your message.
Could you please follow the steps in this message?
Thanks!
That helped! Was able to debug it myslef. Had a problem with the OneDrive settings in my Windows account. Long story. I figured it out and simply made a directory it was looking for. It’s one of those lovely Windows things. Thanks fro the help and putting this script out. I have two different drones I am flying a DJI P4+ and a Aurelia 6 Pro. One runs on Litchi the other on MP. Write most of my research missions in MP, but wanted to fly my personal DJI in a more efficient way as well. Now comes the testing phase.
1 Like
Is there still a 100 waypoint limit for litchi??
No, that limit has been removed.
Hi Yaroslav,
sorry to bother you but I’m having a similar problem on your exe file.
I try to open it but I get this message (I’m using windows 7)
is there a way to use the python script in some other way?
Antonio
1 Like
Hello,
Yes, you can run the python script by itself if you have python installed. If not, you can download it for windows (x64) here
Then on your desktop create a file called mp_to_litchi.py and open it with any editor like Notepad++ or VSCode. Paste the code from my github, save the file and run it!
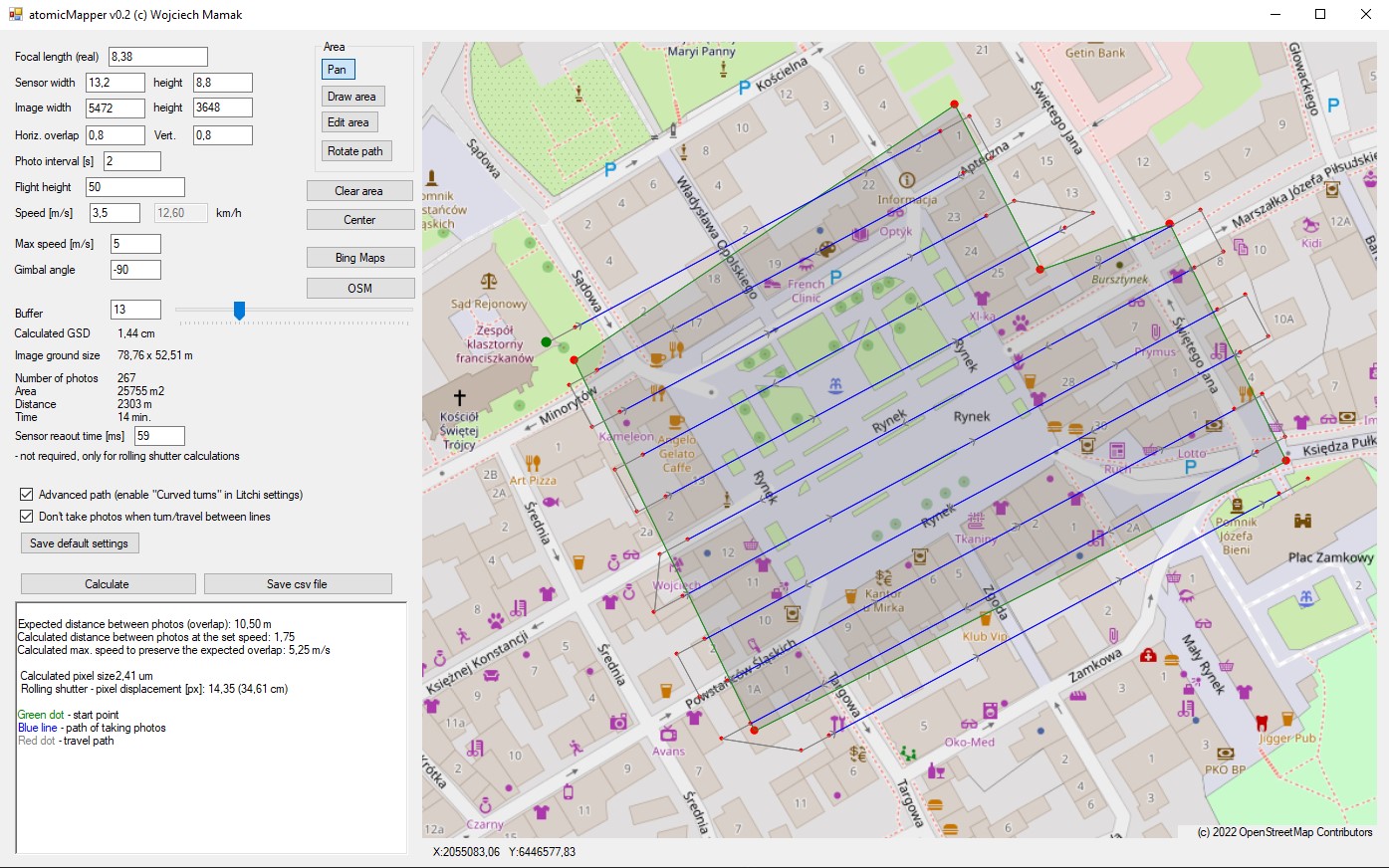
if anyone finds it useful, I wrote a program (unfortunately Windows only) that creates a mapping grid and saves a csv file.
It’s pretty simple and the routing isn’t perfect, but it works (I don’t promise anything, I did it for my own purposes).
Here is a short video with instructions, link to download page is in the description.
I’m waiting for Litchi to have it built in 
3 Likes
Thank God!
At least someone decided to do it!!! Thank you so much, you created what the doctor ordered.
- Can it be Russified? if there is a need, I can help with localization.
- Is it possible to embed camera parameters for each drone in the drop-down list?
- Another interesting point! Can I additionally enable the full stop function of the drone before taking a photo? This is very IMPORTANT!
- I think another important function is to be able to save (missions).
P.S. I am ready to connect to volunteers or beta testers of the program for further improvement and development.
Sincerely, Magomed.
This is a Windows application made by namirda
using “Litchi Mission Hub” specific for Survey Waypoint up to 250 waypoint now
support a whole list of DJI Drones FOV settings
Download latest version here :
Virtual Litchi Mission V2.7.2
1 Like
Hi again everyone.
I’ve finally made a video explaining the process I use to design missions for the Mini 2, but could be applied to other drones if you have a good grasp on capabilities.
I’m calculating everything based on relative elevations rather than absolute elevations, so this method requires that you have a digital elevation model and also that you roughly know where your drone will begin to fly from.
It’s a little bit clunky and boring with spreadsheets but I hope a programmer can see my method and see a way to design a web interface for this sort of thing.

You set the camera mode to 3:4 Single Photo.
Mission Planner automatically calculates where it needs to take photos and it will automatically take photos, but you need to be in photo mode before you start the mission.
Are you sure about this @Yaroslav ? When imported to Litchi Hub there are no “Take photo” actions in the Waypoints… Also, how this “auto-photo” mode works exactly? How do it knows where to take the photos?
Hey guys I’ve been working on a mobile friendly web app for designing grids using any camera specifications. The basics are coming along well so far, just trying to work out the best approach to accommodate for how Litchi works.
I believe a strict takeoff point must be set and adhered to by the pilot in order to conform to set GSD (and so you don’t crash into something). This requirement could possibly be avoided if Litchi made it so before the drone takes off, a request for elevation at current lat/long is sent to their servers by the mobile app, and a delta elevation is applied to each point in the mission. I think this way a pilot can theoretically take off from anywhere and the drone will fly at the appropriate altitude, no matter where it started from. Whether that’s possible with the SDK is a different story…
Wish me luck with the next steps!! I hope to be able to help lower the bar for flying grid missions.

2 Likes
There are no take-photo actions in Waypoints because it uses the trigger-by-distance feature in the waypoints. There is a way in Mission Planner Survey Creator Tool to show where the photos are taken.
My tool is available in beta to explore at https://ancient.land
I created a post at Grid Waypoint Tool
It works in the browser and the UI should be suitable for most modern day mobile devices.
Currently there’s some display issues for some desktop browsers and there’s a few issues to resolve so leave any comments in the thread posted above!

2 Likes
What function does the name of the drone give? Is this displayed for information only?
And how to remove the dot
Each drone has a different camera, so to maintain the same overlap values, GSD, etc, the lines are recalculated and the height to fly is also recalculated.
When you say dot, do you mean the home point? I don’t have a way to remove a home point once it’s placed on the map, but you can click the button again and draw it somewhere else.
The green dot is necessary to calculate the different heights of each point, otherwise drones like Mini 2 do not have a way of tracking their elevation inside of a Litchi Mission. It is considered ‘0’ elevation and everything else depends on us beginning the flight at this point.
No. I want to delete one waypoint how to do it?
For now there’s no way to select individual points. It’s simply drawing points along lines which intersect your polygon.
If you design the mission with the point you want to delete at the end, then you could edit the mission in Litchi and delete the point there.
I understood it. To do this, the camera parameters are indicated below. But the camera settings will only be available when litchi connects the drone. And I don’t see how on the map you can understand that the photos overlap each other.