Thankyou James
I wasn’t confident that I had an unedited version of my original Mission so I created a new one and tried to make the same choices as before.
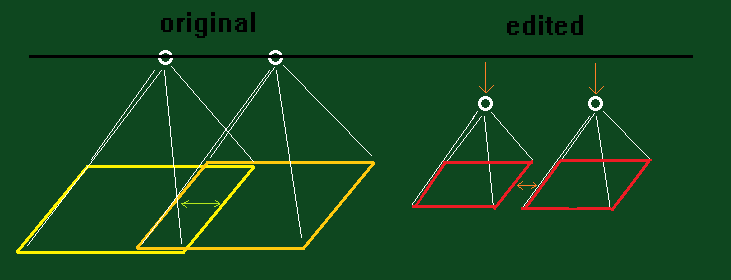
This is the original unedited
This is the same mission but edited in Litchi Mission Hub
Changes Made
I selected All waypoints( I selected Waypoint 2 first then Held command and selected waypoint 1, this way I could see the options that were also available from waypoint 2 and beyond. I f I selected waypoint one first I would not have had TAKE PHOTO Available to me.
-Changed the altitude to 70Ft
-Speed to 4MPH
-Heading to 208
-Interval to 3 seconds
-Deleted Take Photo Action
-Selected Apply
-Selected Waypoint 1 and changed the speed to 25MPH ( waypoint 1 is about 900 ft from where I want the mission to start so I wanted the drone to get to Waypoint 2 ASAP to start the search grid)
Thank you for all of your responses
Cheers
Tony
Это определяет, будет ли ваш беспилотник менять направление после каждой линии или он будет смотреть в одну и ту же сторону.
This setting switches between your drone turning 180 degrees after each line, or whether to keep the drone facing the same direction and flying ‘backwards’ instead.
By default, the drone turns 180 degrees but some people prefer their photos having the same orientation.
It’s interesting that you remove ‘Take Photo’ from the waypoints. I included it at each waypoint as a way of ensuring that a photo was taken at that location. Perhaps it isn’t necessary to include it but I’m not sure at the moment.
In short, you shouldn’t need to be adjusting waypoint heights by the time it reaches the Litchi mission hub.
The geometry, elevations and speed for a waypoint is suited to the parameters you set on the site. The waypoints are spaced at particular intervals based on the elevation(GSD) and overlap sliders. If you make a set of waypoints that are generated with particular settings, then batch change eg. the elevation or speed of each point after the fact, you’re affecting the overlap % etc which can potentially cause issues in stitching photos.
All the calculations on ancient.land should agree to how the flight operates so there need not be any changes. If the mission isn’t performing how it was designed, there may be some calculation I’ve stuffed up but I’d need to really look at what happened, distance between photos etc. and reverse engineer it until it’s sorted. I can’t physically test every drone so I’m going off numbers online and my limited understanding.
Adjust the GSD value on the website until it’s at a level that is reasonable to you.
The reason it’s GSD and not directly ‘elevation in feet/metres’ is for map quality purposes, but the numbers are there for us to choose based on either perspective.
Additionally, the missions are designed so that the first and last point have their speed set to ‘Cruise’ which is actually determined by the pilot inside Litchi’s app. When the drone is connected to the app you should be able to set that speed and it will fly at the designated speed whenever a waypoint is ‘cruising’. You can set the speed for each waypoint in between on ancient.land and the time between each photo will adjust (Might have to add that statistic for everyone to see instantly instead of needing to mentally calculate it).
Thank you James for taking the time to look at my missions.
-Totally understand now not to adjust the waypoint height once imported to Litchi and thank you for the clarification.
I just have to remember to set a height in Ancient Land and not change in Litchi.
The reason I removed the “Take Photo” instruction was I feared that now I had set the interval to 3 seconds I thought that would either supersede or interfere with each other. My original issue was that the drone would stop at each waypoint to take the picture so I assumed that setting the interval to 3 seconds and leaving the "Take Photo " instruction may corrupt one or the other. Having said all that I have a couple of days now where I can test different options.
Lastly , I understood that in Litchi the Cruise setting is the speed that the mission will fly.
So I thought that the mission speed was also determined by the cruise number.
So I changed waypoint one speed in Litchi so it would fly faster to the second waypoint where the mission actually begins. The search area is about 900 feet from where I would take off. This is also something I will test over the next few days.
If there are any Phantom 4 Pro scenarios you would like me to test let me know and I will try over the next couple of days.
Cheers and thanks again
Tony
All good, thanks for your experiments as it helps the project.
I hope the program is correct so that you only need to press ‘take off!’ after it’s saved. There might be a few little bugs that cause issues in photographs so if any are found I’ll be glad to fix them. Flying at 50% frontlap and 50% sidelap helps gauge how well the design operates for a particular drone setting.
Great James
I just created a mission In Ancient Land a small grid at the airfield.
Phantom 4 Pro
I set the speed to 3.1m (10.2ft)/s
GSD 0.4: 14.6m: 47.9ft
Sidelap and frontlap to 50%
The Z Check to 5
also set the Alternate direction so I can see the straight arrow in the button and not the circular arrow
In Litchi set my cruising speed to 20MPH
Otherwise I took your advice and changed nothing
Secondly I saved the same mission and the only change was I deleted the “Take Photo” instruction on all Waypoints.
I will check both missions tomorrow and let you know.
Thank you again for your program and all your advice.
Cheers
Tony
Hi James
I flew the mission today and started it by selecting Play and it started automatically as you suggested. and in both cases The phantom 4 stopped at the waypoints to take photo.
It took a picture every 3 seconds on the move but would stop at each waypoint.
After deleting the “Take Photo” action I would have thought it would just keep flying.
Sorry for all the questions.
One thing I did add was an action on the last waypoint to Tilt camera to “0”
I figured if it was going to return to home and land I wouldn’t want the lens facing down.
Itook your suggestion and now understand better about the cruise setting. after I read what you said I am now flying from waypoint 1 at 15MPH
Thank you for all your help
Tony
It’s been a common issue that drones are slowing on approach to waypoints, which spawned the whole concept of the Z-Check setting to reduce the amount of waypoints generated on each line (at the cost of elevation accuracy) whilst still maintaining the same number of photos. I haven’t tested whether removing the photo function speeds the drone up as it approaches a waypoint but I suspect it won’t because the drone is probably trying to conform to “touching” a specific coordinate with sufficient accuracy. My Mini 2 took almost 5 seconds to move on in a headwind one time.
My understanding is that actions are set and maintained at the start of each waypoint until reaching the next waypoint’s instructions. If you tell the drone ‘take a photo every 3 seconds’ and your waypoint distances are 9 seconds apart, will the drone take a photo at the 9th second? That’s where the next waypoint is supposed to be. That’s why it’s an interesting question you’re exploring, whether ‘Take Photo’ is necessary at the waypoint, or whether the photo always gets taken before it moves onto the next waypoint instructions. My intuition is telling me there’s a risk that photos might get skipped at the actual waypoint location. Head/Tailwinds might affect drones that are taking shots based on time. Slope distance traversing might affect drones taking photos based on distance, because I’m unaware whether each drone’s distance calculations are in 2D or 3D space. My bet is 3D space which complicates things.
Your suggestion to reset the camera to 0 is really good, I’ll hardcode that in because it’s a safety issue for RTH.
awesome James
It’s raining at the moment but if it stops by morning i will head to the airfield and run another mission.
I will pay more attention to the photo capture options .
Perhaps I will do a mission and make the capture e longer duration maybe 9 or 10 seconds and see how it behaves at the waypoints.
I know you can’t personally check every drone out there so if you have an tests or trials for a phantom 4 I would be happy to try them.
Cheers
Tony
If you want to take interval shots and not stop at every waypoint you need to select “curve turns”. But the drone will not perform the actions specified in the waypoints.
This means you are taking a photo every ~1.0875 seconds, I’m not certain if Mini 2 can write data this quickly, so let me know! Decreasing speed will help with rolling shutter issues.
Also, if it is a flat area, you can increase Z-Check to help the drone maintain momentum, as seen here
Open Drone Map has support for rolling shutter correction. Unfortunately not all photos are taken at the same speed so it’s not a perfect solution but it should improve results. I think more advanced drones with rolling shutters tend to have their current speed saved in each photograph to calibrate each photo.
I think it’s really pushing the Mini 2 to the limits and one would need to be very diligent if using data from Mini 2 for any products claiming survey grade accuracy.
I want to ask, when the drone has reached the last waypoint, will the drone automatically return to the home point, or will it need manual action to return?