1 Like
I understand, it’s enough to give the RTH command in the litchi hub settings.
Thank you for the response and explanation sir, hopefully in the near future I can try it
Hey @James1 your tool is really awesome and making my mapping life much more easy. Really great Work thanks a lot!
Are you still thinking about implementing the Option, people talked about before, to load in Shape Files or something similiar (kml etc) for the Polygons ? And the Option to Save and reload Missions ?
Best and thx again!
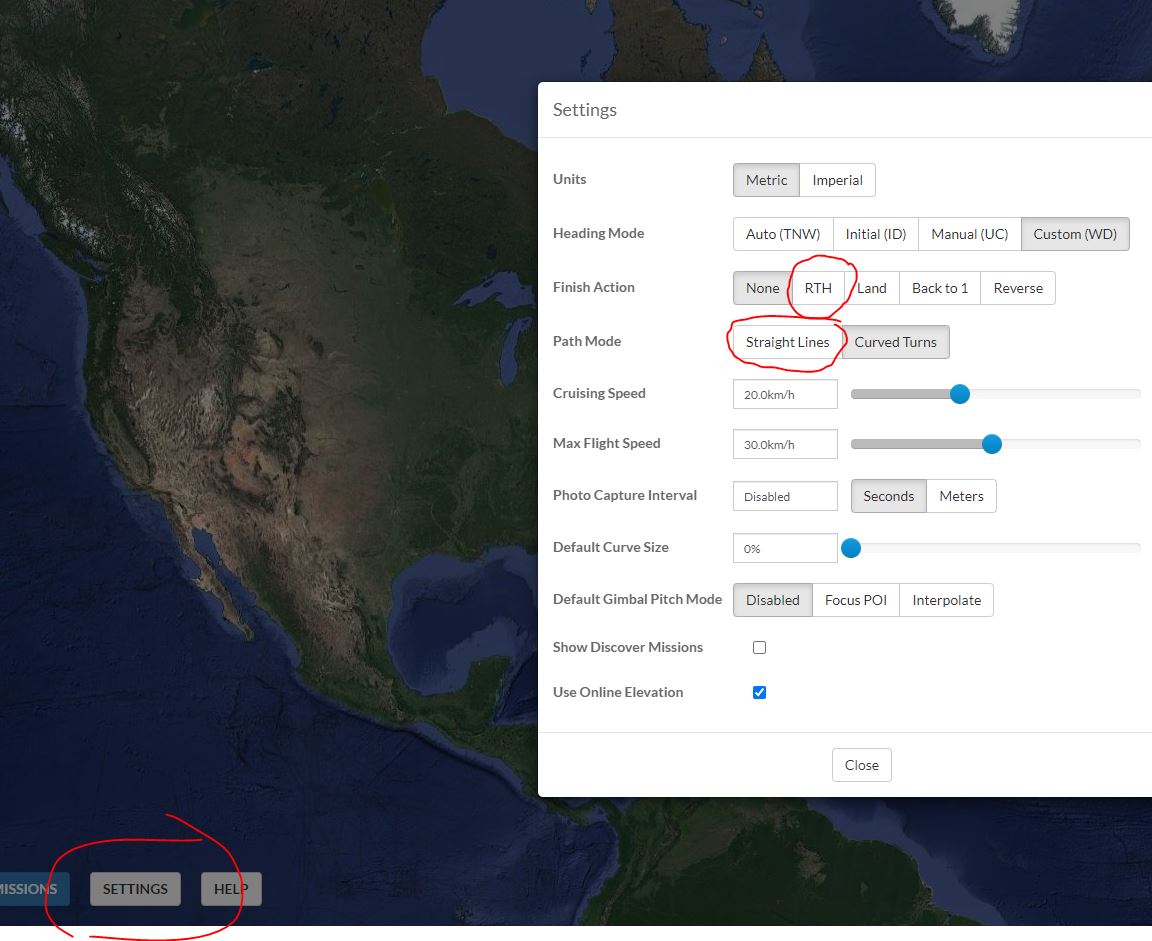
EDIT: 2 More Questions, sometimes flyhub shows straight lines, sometimes it showes curved turns in the settings when loading Mission from ancient.land ? Why ist that ? Isn’t straight lines for mapping (which this tool is mainly used for i gues) he best Option ? And 2. one, sometimes flyhub shows photo capture intervall 3 or 4 seconds even if Z-Check is saved at 1, why is that and is there a good reason or should i just disable it manualy?
1 Like
Hi James !
I also thank you for the beautiful work you have done and shared …
I too would like the ability to import shape… is it possible this function?
Thanks
Bert
Hi James, I did some flights meanwhile. Works great for me with my old phantom 3 standard. I usually use 83% sidelap and 50% frontlap at height of 40 or 50 m above ground. I found out that it is best practice to hover the drone for 1s and then take photo at each way point where a photo is to be taken:
tilt camera -90
stay for 1 s
take photo
cruising speed can be around 3,8 to 4 m/s ~ 14km/h.
processing pictures with webODM gives very detailed orthophotographs that suit my purpose very well.
Thanks a lot for that tool!
1 Like
James,
Very useful tool.
It would be nice if the search box would accept lat-long coordinates.
I live 10 miles from the nearest zip code center.
Also, I often operate in areas where I am not familiar with the local zipcodes.
Just found your mapping tool, its great.
I just wonder if it would be possible to set a custom drone setting if non of the included apply, like setting FOV and sesor resolution manualy.
Next is to include crosshatch and if you wich my own idea, the “starhatch”… three flights, the second and third angled 60 and 120 degrees from the first.
If you are an Excel (or other spreadsheet) user, you can accomplish that.
Create 3 missions (1st at 0°, 2nd rotated to 60°, 3rd rotated to °) and export each one as CSV.
Combine them using spreadsheet program.
If you try this, be aware that AncientLand creates a Home Point and Return to Home point for each mission. You can leave those as waypoints, or delete them when you combine the CSV files.
2 Likes
Is the first and last point that needs to be deleted?
I just read that there’s a limit on waypoints in litchi, 100. That’s a troublesome limitation
Read the May 2022 Updates:
If you create multiple grid missions in AncientLand, you dont need the Home Point in Mission #2, #3, etc.
Delete the 1st (Home) point of those CSV files (#2, #3, etc) when you combine them.
Try something small and manageable first, to work thru the process.
1 Like
It would be nice to make a windows app out of this. I don’t have the code though.
1 Like
True. But you have to admit, you cant beat the price if you’re willing to do a few steps. At least until something else comes along.
1 Like
While we wait for litchi to add a grid tool I hope you can add a “custom drone” selection, where I can set FOV and sensor parameters.
I have a Mini3pro you know.
I dont think there is an option to add ‘custom drone’. The Air 2 would be the closest to your Mini 3 Pro.
Similar CMOS size (1/2" vs 1/1/3" for the Mini 3 Pro)
FOV (84° vs 82° for the Mini 3 Pro)
Image size (8000x6000 vs 8064x6048 for Mini 3 Pro)
Would be awesome to choose google maps instead of mapbox satellite. Mapbox satellite is pre 2014 in Sweden.
This is a screenshot of a mission I planned today:
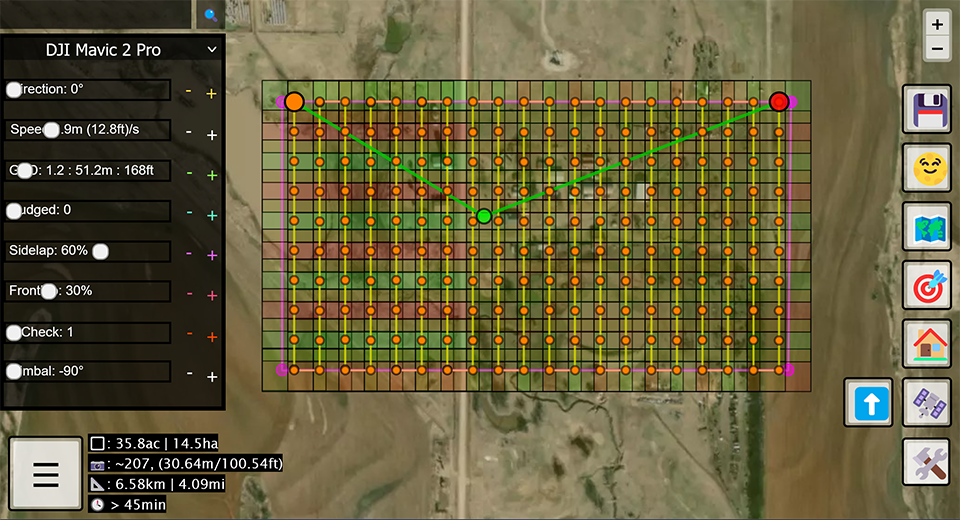
Note how the slider buttons overwrite information - particularly Speed.
I would prefer to see Speed displayed in kmh or mph. I understand Litchi uses the m(ft)/s value for import but Litchi “Settings” are in km/h or mph.
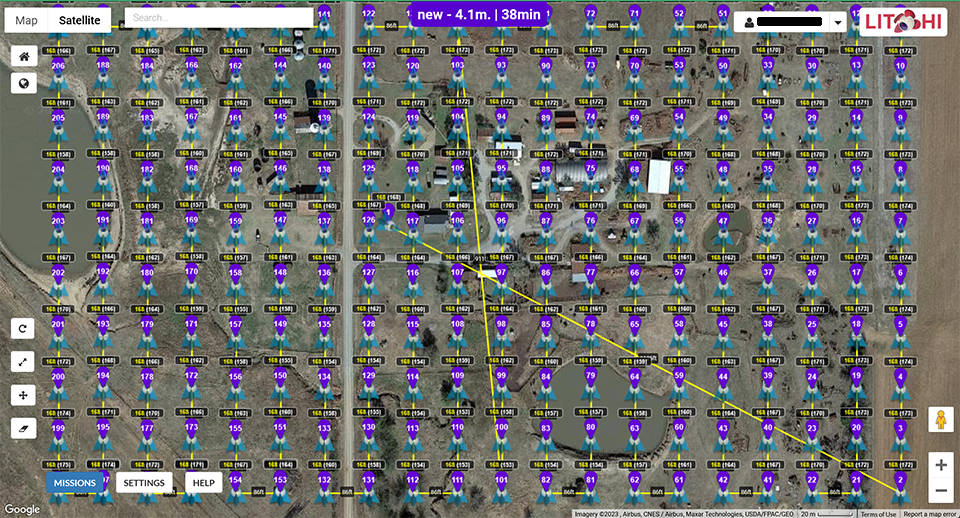
This is a screenshot of the mission imported into Litchi:

Settings: Heading mode=Custon (WD) Speed=8.7 mph
I was surprised to see the aircraft icon pointed south/180 degrees since the planned direction was 0 degrees.
The difference in estimated times between 45 for GMD and 36 for Litchi is probably due to GMD shows a path from the last point on the grid returning to the home position.
To correct the aircraft direction (I prefer to have to top of images to be oriented to north) I adjusted the direction in GMD to 180 degrees.
Screenshot (GMD):

Note the direction slider button overlaying the direction value.
However, the primary issue is the course error seen about midway through the mission. According to the Litchi mission the error is between waypoint 101 and 102. Waypoint 101 is at the bottom of the grid and Waypoint 102 is at the top of the grid. The grid starts with Waypoint 2 - the orange circle at the lower right corner.
Screenshot (Litchi):
The path error only occurs when the direction is changed from 0 to 90, 180 or 270 degrees.
Overall, I think this is a very valuable tool. Great job, James.
@Jim_Smithheisler ,
Here are a couple of things you can try. You may like them or not, just options.
I created a mission in AncientLand similar to yours. The START and END points are on the North side of the mission, like yours were. I turned the image footprints off to make it easier to see.

Just by changing the ‘Nudge’ factor from 0 to 1, it changed the position of the START and END points.
I didnt have to Rotate the mission. I did rotate it to 180° which caused the course error, like you saw.
The Nudge is an easy way to tweak a bit.

Another option for you to try, if you want to eliminate all of the waypoints along the vertical paths (but leave all of the turn-around points) is to use the Z-Check. I bumped it up to 11 and this is the result.

When this mission is imported into Litchi, it looks like this.

To me, it gives me more flexibility to change the Photo capture points by varying the Cruising Speed and Photo Capture Interval.
1 Like
I like your suggestions and options.
I “discovered” the starting point and direction of travel while creating the polygon impacts the start (orange) and end (red) mission points.
If the polygon is not a true rectangle the start and end points move. Also, the path error may be encountered.
I have a tool which processes the exported csv file to add “recovery” and “landing” waypoints to the mission. The additional waypoints increase the accuracy of the estimated mission flight time in Litchi as well as function as an autonomous return to home task.
With the “recovery” waypoint within 10 feet of the takeoff point at mission altitude and the “landing” waypoint the takeoff point at 10 feet, the aircraft comes to a low hover at the takeoff point.
I normally takeoff and land from a mobile landing pad, a 4 foot square flat, wooden, rubber surfaced area mounted on a small 2 wheel trailer. (protects my aircraft from terrain hazards and puts it at a comfortable height for access)
It also changes the aircraft heading.