извините, я не могу ответить все по-русски. если вы ещё не можете понимать, пожалуйста дайте больше вопросов.
Z-check is a setting used to balance how often a waypoint is created along a line. As you increase Z-Check, less waypoints are generated, but photos are still taken where a waypoint could be (Photos by distance interval is implemented).
These are the main ideas behind this setting:
Drones slow down when they approach each waypoint, costing extra time. The less points you have, the faster you can fly. I can’t change this mechanism.
Waypoints are the only way to adjust elevation to match the terrain. You need waypoints if you want good consistency in photo detail.
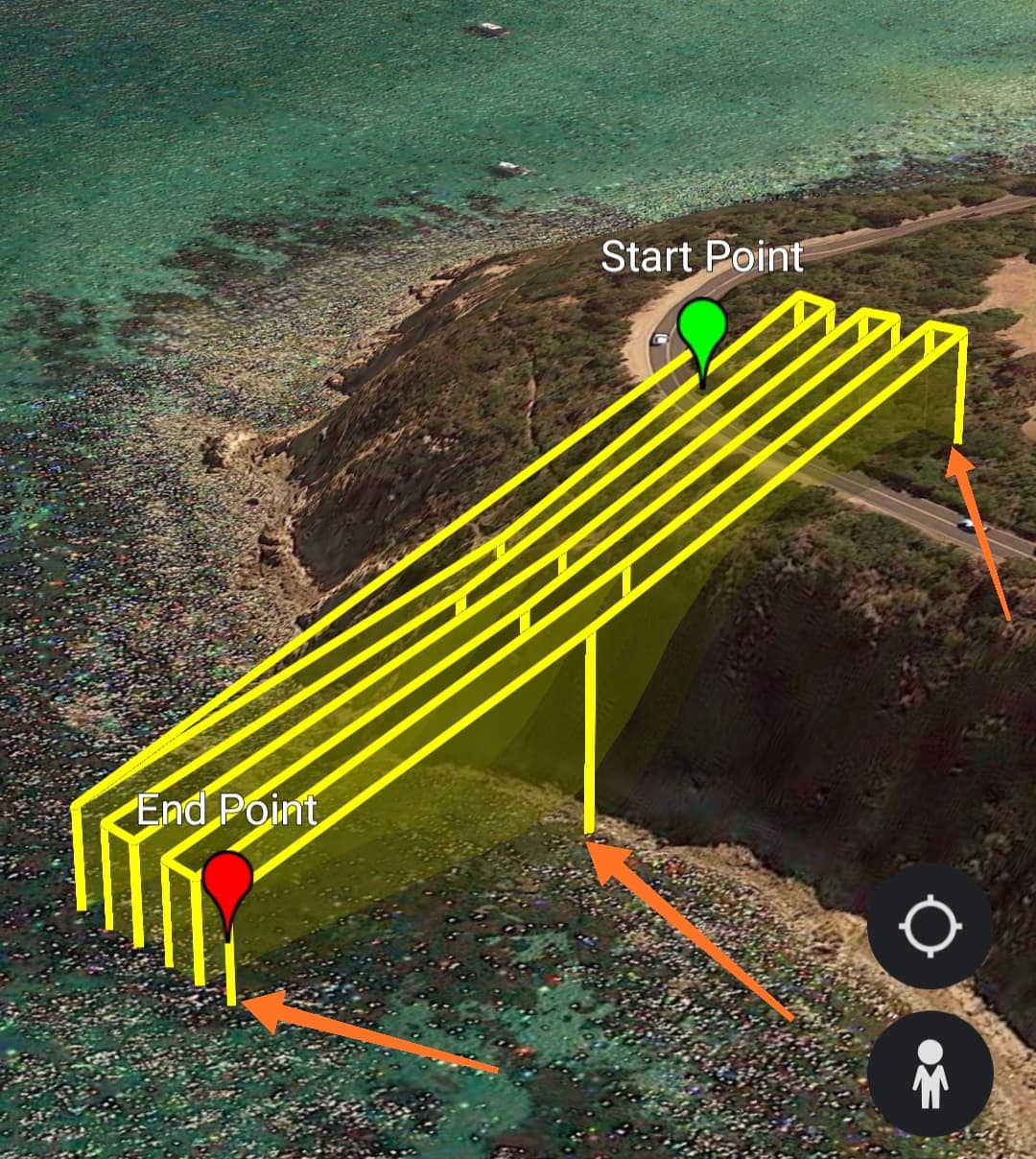
We can compensate with how many waypoints are needed, based upon how demanding the terrain beneath us is. If we fly over a flat farm, only waypoints at each end of the line are needed. When there are hills, etc, we can reduce Z-Check to update our elevation more often.
The higher Z-Check is, the less often we observe the difference in elevation between the terrain and the drone. Please also observe that digital elevation model isn’t exactly perfect to begin with. You can see how dangerous it can be to fly near cliffs at low elevations.
Another way to describe it could be “Waypoint Frequency”
Вместо этого фотографии делаются в движении.
Вы должны получить такое же количество фотографий, только с меньшим замедлением.
Соответствие земле уменьшается в качестве компромисса. Кроме того, необходимо учитывать размытие при съемке фотографий в движении.
Photos are taken whilst in motion, between two waypoints which are set further away. The distances are all equal, just the drone does not slow down. The same amount of photos are taken, just in motion to save time. This comes at a cost of reduction in conformity to terrain and also may introduce motion blur in photos if shutter speed is not appropriately set.
This is very difficult to provide with the current service. My geometric calculations are 2-dimensional. The heights (slope distances) are calculated only when the mission is uploaded to Litchi, since we use their elevation model. The mission time on my site is currently too optimistic (it is simply horizontal distance divided by expected flight speed). If your drone can comfortably fly for 20 minutes, I would recommend designing a mission that will run for 15 minutes with minimal waypoints, and having the drone be near the operator as the battery is near depletion to maximise safety.
Optimising mission time estimation would be very desirable. It will require some experimentation as there are a few variables to consider.
I totally agree!
The other day I’m shooting an orthophotoplane, I ran into this problem. The program showed one time, in reality I needed two or three times more time.
Yes, I apologise for the inaccuracy. Really, the time displayed at the moment suggests ‘this is the absolute fastest the mission could mathematically fly’. I could add 50% to the time and it would probably be closer to the truth but it’s more complex than that.
As a drone approaches a waypoint it slows down, increasing mission time. This is one factor.
Another factor is adjusting for travel in 3 dimensions, not just 2, which is what my geometry works in.
Only estimates can be provided until my variables are more complete. I might just add ~30% for now so that users don’t get too ambitious in mission size.
Hello, James!
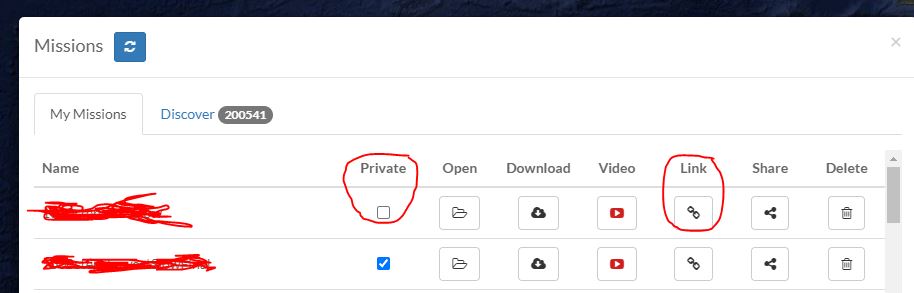
I see a few interface changes.
Now it is possible to search for a location.
Thank you very much, you really help us, the pilots.
Sincerely, Magomed.
Hi James
I appreciate the quickness in which you implement changes.
I tried today your suggestion to adjust the value of the Z check and that allowed me to set increments in the take pictures in either feet or seconds.
I set my flying speed to 4 mp and my take pictures every 20 feet.
Also tried an option to take pictures every 4 seconds then every 6 seconds.
What I found was my Phantom 4 pro drone could not take the pictures soon enough . It seemed like a buffering delay. Yet when I am not in a waypoint scenario I can manually take pictures as quick as I can push the shutter release button.
Do you suppose this is a limitation within your program or might it be a setting in Litchi.
-Thank you for changing the opacity in the Photo Footprints
May I also be as Bold as to ask if you could add a setting that would maintain the drone direction throughout the mission.
Correct me if I am wrong as I don’t really understand the orthomosaic process. Some cases I would manually align the pictures and If they are all facing the same compass heading it would be easier to manually stitch.
I am able to go into the Litchi Mission Hub and Select all waypoints and batch change the direction heading so it’s not a hard thing to change but just wondering if any one else sees a need.
Regards and thank you for all your attention to questions asked.
Tony
Yes I’d really like to make circular missions at the very least. It’s on the list!
Perimeter capture is an interesting addition. Every feature that improves 3D reconstruction is desirable. Perhaps at every end point the drone can turn inwards and take an oblique photo before moving on to the next line.
I’m actually not fully aware of the concept so thanks for suggesting it. Research to do.
Does the P4 fail to take photos every 4-6 seconds? If so, it doesn’t sound right.
Moving at 4m/s and taking a photo every 20ft(6.1m/s) is closer to pushing the boundaries of read/write, but each device and SD card has its own limitations so it’s difficult to find the culprit. I give myself at least 2 seconds with a decent quality SD card.
It’s a good question as to how the P4 pro responds to preprogrammed actions. As was pointed out, the current format of the planner doesn’t immediately supply Phantom pilots with what they need so it’s high on priority.
You’re not the first person to ask for unidirectional missions. I personally think they’re outdated now that Open Drone Map (free and open source) can handle photos of every orientation and still spit out a good result. The modern process is very robust.
Alas it’s not too difficult for me to implement.
Once it’s in, you should see a button like this, switching between unipolar and bipolar heading.
Hi James ,
Once again thank you for your quick responses.
If I can bore you?
I am using your program as a Search tool for downed RC aircraft.
I fly at a field that has some wooded areas at its perimeters. It’s usually understood that if you lose an aircraft in the woods you pretty much give up on seeing it again. But if you’ve ever played golf and lost a 50 cent ball you will spend an hour looking for it. Not because you are cheap but because it’s the thrill of finding it.
I fly the phantom 4 pro drone and when someone loses a plane I love to try and find it. sometimes we find it and sometimes we don’t.
So I fy the search pattern at about 50 - 60 feet, just enough to clear the tallest trees.
So the Z check advice you gave me really helped but I found that for some reason my drone wasn’t taking the pictures at the set increment. Yet when I exited the waypoint mode in LITCHI and flew in FPV mode I was able to take pictures manually as quickly as I could push the shutter button. so I know it’s not an SD card read or buffer problem.
Tonight I imported the CSV file from your program into LITCHI Mission Hub.
Then in Litchi MIssion Hub selected all Waypoints and then In Litchi Mission Hub “settings” set Photo interval setting to every 4 seconds.
Still in Mission Hub selected all waypoints again and deleted take photo action. This batch deleted all take photo instructions from each waypoint.
Lastly in Litchi Mission Hub I selected all waypoints again and set heading to the same for all . In my case 299 degrees .
I’ll test it tomorrow at the airfield
I guess what I am getting at is I’m asking you if I am over complicating things???
Is there a less convoluted way’
As much as I’d like to stitch all the photos together to make a big higher resolution search picture the great thing is if I do find an aircraft I can get the Longitude and latitude information from the photo that has the wreckage and locate it that way.
Any advice is really appreciated James
Thank you again.
Tony
Sounds like a noble cause to find downed vehicles, definitely easier to see from the sky.
Can you share 2 of the Litchi missions with me?
First one is the CSV file that the ancient.land website makes and secondly the one that you’ve edited to perform the way you hope.
How often are photos actually taken during the waypoint mission, compared to intent?
A problem a lot of people run into is having their lines set to be curved, whereas they must be straight. It might be something as simple as that which causes malfunction. I don’t doubt there are bugs in the website at the moment but I need some objective information to compare behaviour vs design.
If you do that for both missions I can see what your intention is for the mission you need.
I pushed an update to the website anyway to support unipolar flights (one direction only) and also native support for photos by time, which should hopefully solve the issues with Phantoms.
Another update I’ll push soon is force heading to be different to flight direction, for the people who strictly want photos in a particular orientation independent from flight path.