Thanks.
For some reason the network I was connected didn’t register as “connected to internet” even when I was able to use internet with other apps. It was also to find Googles DNS 8.8.8.8.
Changing to an other WIFI network solved the issue.
Thanks.
For some reason the network I was connected didn’t register as “connected to internet” even when I was able to use internet with other apps. It was also to find Googles DNS 8.8.8.8.
Changing to an other WIFI network solved the issue.
I started using this with my mini 3 pro, and other than a couple times the drone stopped moving (a pause/unpause got it moving again) this has been working great!
I’ve exported a track, then re-imported it after making some bulk manual adjustments in Excel, and it seems to work great.
My test plan moves to a location, stops, takes a -90deg down picture, then a -60 degree picture, then moves to the next location.
VERY excited to do much much more with this!
I have been testing out the Litchi Pilot beta on a DJI mini 3 pro.
Sometimes the drone gets “stuck” on a waypoint but a simple pause and resume seems to fix this.
However I’ve also been having problems with settings for Photo Capture Interval. No matter if I set it to use the generel settings or for each indiviual waypoint it always uses 10 second intervals no matter what I set it do. I tried to use both the generel settings and individual waypoint settings to set this to a 4 sec interval or based on meters, but it defaults to 10 seconds no matter what I set it to.
Has anyone else had this problem and maybe know how to fix this?
Hi,
Did you have a strong enough signal during the flight? We were not able to reproduce your problems, can you send us the faulty mission so we can test on our side? Give us more details about the flight, what photo format you are using (raw?), is your SD card fast enough…
Do we know when the flight modes will be installed. In particular I am looking for an Orbit. We are doing telephone poles and what I need is to setup and Orbit mission, then be able to move the POI to the next pole and have the drone fly the exact same mission. So PLEASE get the ORBIT working.
Thanks In advanced.
Been using this with my Mavic 3 E and it’s been very good.
I mainly use this to hop directly from waypoint to waypoint (usually not in numerical order).
Would it be possible to fix the “Starting Waypoint” so it can start from the final waypoint? Whenever I try this, it’ll start from the second last waypoint.
Also, would it be possible to remove the start from last waypoint prompt?
Instead, maybe add it as an option in the “Start Flight” window so there’s less prompts.
Having some issues with drone stopping at random way points and not continuing until I click end mission then start again and selecting the start point as the waypoint it’s hovering at.
This has only started recently on missions I have flown several times before - anyone else experiencing this?
We’re working on Hub 2.0 currently, Orbit will come at a later stage
Are you trying to execute the flight in reverse or do you want to just fly from the 2nd last to last waypoints?
We will try to improve the popup flow
Could this be a signal issue? Do you see any on screen error message when it happens?
Any chance you could elaborate on your experience with Litchi Pilot and M3E? I’m thinking of getting one just to bring my Litchi into the modern era - I’m currently using regular Litchi and a P4P v2, which I love.
We are using the the M3E with the Beta version which is awesome. We are creating a .csv and uploading that onto Mission Hub to execute our flights. Now if we fly this mission with the Mavic pro it, the craft will fly through each waypoint until it gets to a waypoint with a unique action. That same flight using the M3E the craft stops at very waypoint and its painful. Is this something that can be resolved please.
Cheers
are you using straight lines path mode?
Yep using straight lines, if the flight is uploaded to P4P or Mavic pro its sweet and will transition through each waypoint smoothly, but when using the M3E the same flight path its stops at every waypoint
Are you using the DJI engine or the Litchi engine? You can check which one is active in the Litchi Pilot settings when connected to the drone.
With the Litchi engine (and I believe the DJI engine too), the drone will stop at each waypoint when the path mode is set to straight lines. In a future update, we are considering changing it so that if a waypoint is on a straight line between 2 other waypoints, and it has no action, the drone will just fly through without stopping.
ps: for old drones, it should behave the same. If the drone did not stop, most likely you used the curved turns path mode
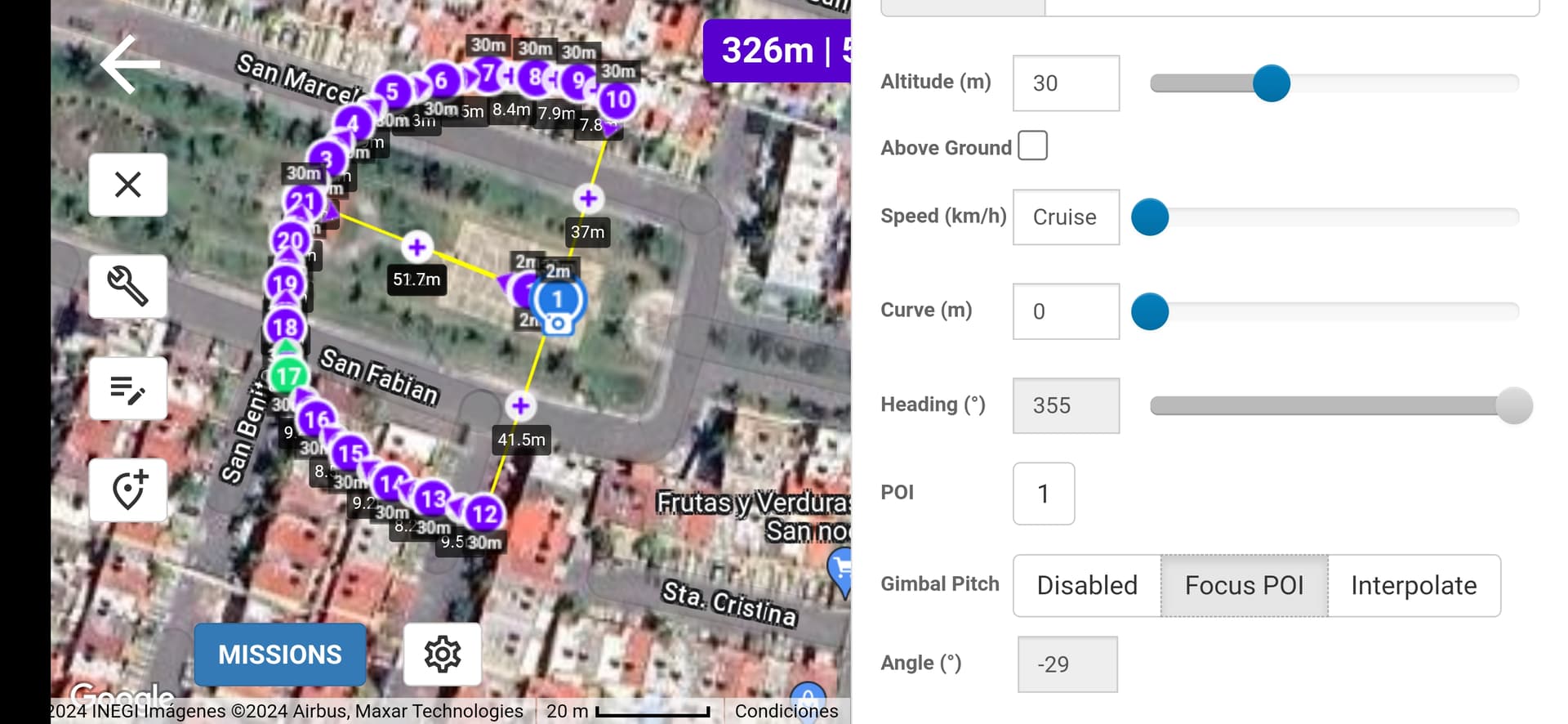
Question, why I cannot do a mission with POI? I did a mission with all the points watching the POI 1, but the mini3 just watch the angle but not the POI ;(
Am I missing something?
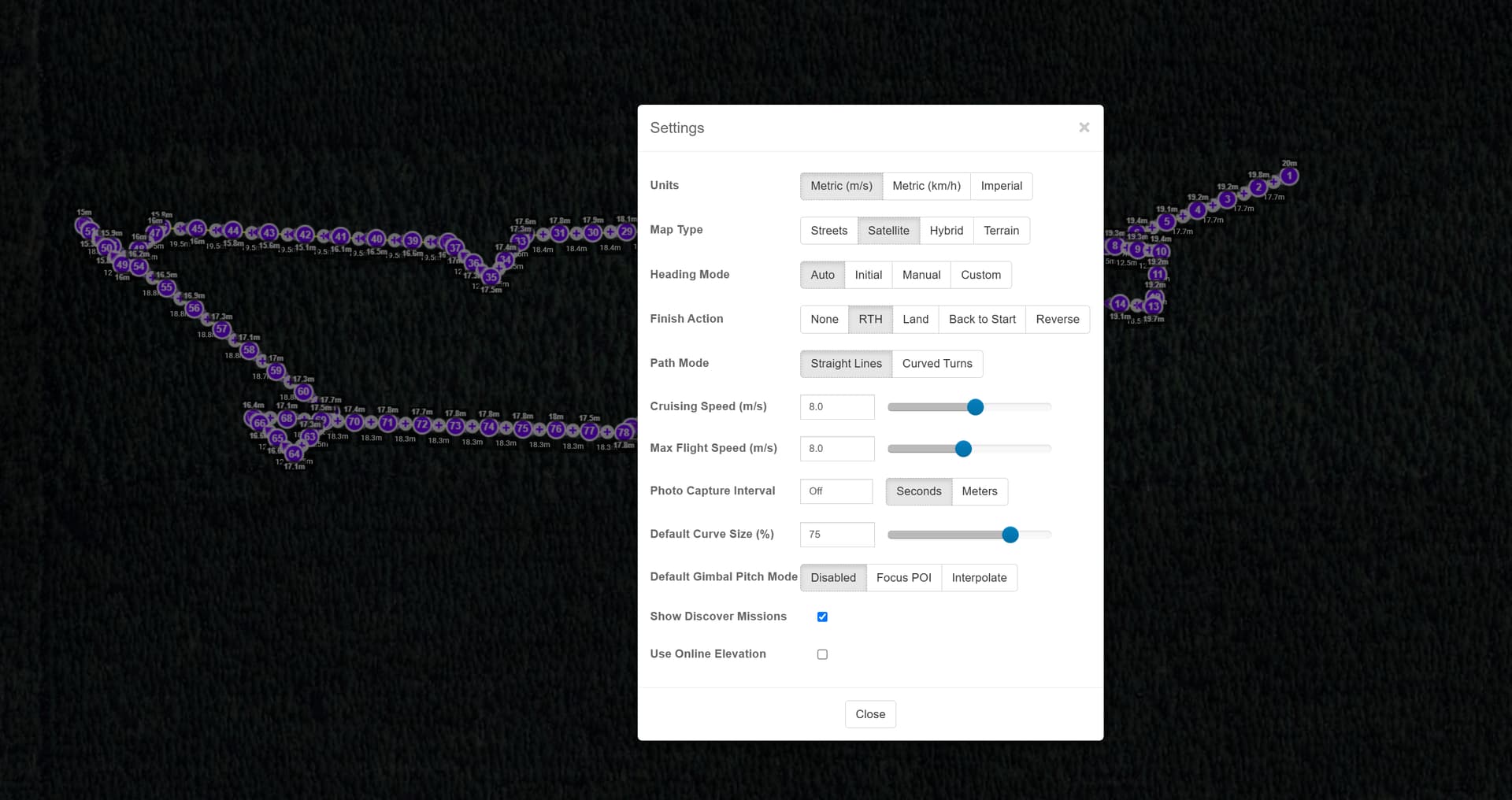
In “Settings” (the gear icon), you will need to change the “Heading Mode” from “Auto” to “Custom”. The “Auto” mode causes the heading to always point tangent to the flight path. The “Custom” mode allows you to control the heading via POIs or explicit heading angles.
I will retry and confirm you later, thanks a lot for your help!!!
It works!! Thanks a lot, now another question how can I achieve a round of 360°? I tried to add an action, then, rotate aircraft and set the angle to 360° but the aircraft just move a few degrees and then follows its way (I notice the dron reach the 0° with the north when I set the rotate angle to 360°)