The altitude change between waypoints is a gradual change.
The “Smooth curves” option is there. In order for it to appear, you must first select a DJI drone that supports on-board waypoints.
You can report anything here. However, you no longer need to export a KML file for Google Earth Pro if it is for the purpose of simulating the flight. That function is now built into the Flight Hub.
1 Like
That is probably not possible. DJI’s advertised range is several kilometers depending on the drone. What normally limits the distance are obstacles between the drone and the controller. There is no database of trees or objects from which that distance could be calculated.
I was thinking of having recorded flight data. Radio transmission strength, video transmission bps, lost signal location, references to base station/remote/phone/tablet GPS and drone GPS.
You do not have to assume. When using POIs, if a waypoint is associated with a POI, the drone/camera will have its heading point to that POI at that waypoint.
The hub already does this. Each waypoint icon has a small arrow indicating the direction the drone will point at that waypoint.
That is a separate setting called “Focus POI”.
You can do this by manually placing a POI and waypoint near where you will launch from.
Most of those quantities are available in the flight log including uplink and downlink signal quality, location of signal loss, GPS coordinates. Controller location is not available that I have seen.
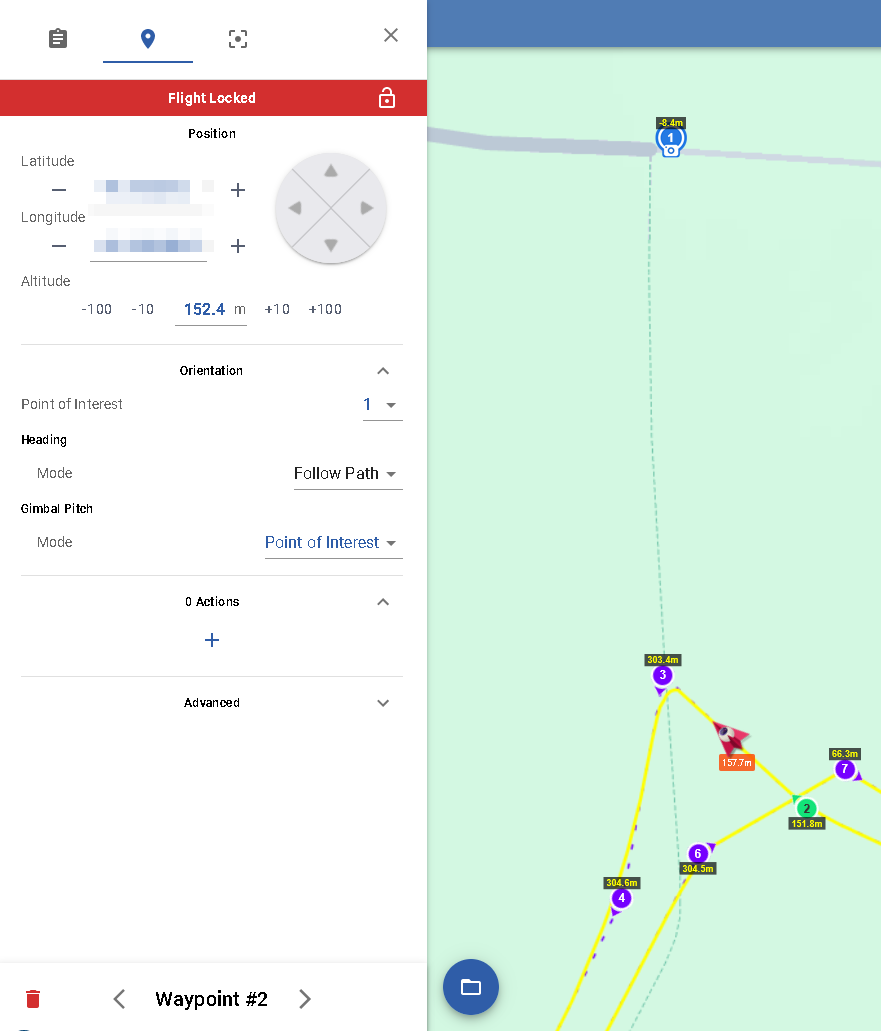
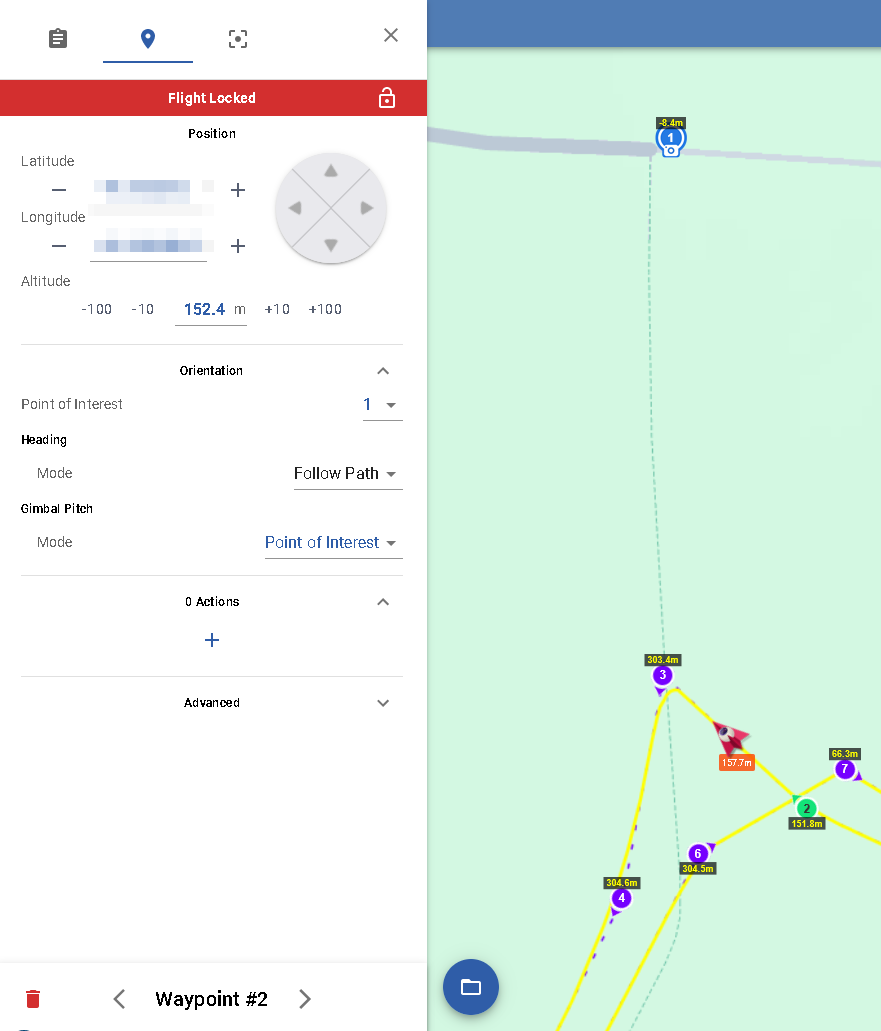
Orientation:
From a waypoint when I select the POI, the gimbal pitch model doesn’t automatically select “Point of Interest”.
In this example, Waypoint #2 camera is not pointed towards POI #1.
I also cannot change the heading mode. But I assume the drone will still maintain its heading along the path, while the camera should have been pointed at the POI.
Litchi Hub Settings:
Are the settings stored for the Account or Browser?
I think they are stored at the Browser (maybe session too).
I would like the unit settings saved at the Account level, so all my devices/browsers will have the saved settings.
That is correct. It doesn’t. In Litchi, the drone “Heading Mode” is independent of the “Gimbal Pitch Mode”. Selecting a POI number for the drone heading only affects the heading. Selecting the gimbal mode “Focus POI” only affects the gimbal pitch angle. These are kept separate to provide more flexibility.
That is correct. It is because your global heading mode is set to “Follow Path”. Since the heading cannot both follow the path while pointing at a POI, this is probably a bug. When the global path mode is set to “Follow Path”, the software should probably prevent you from selecting a POI for that waypoint.
In the new Mission Hub (v2), the heading mode is a global setting and cannot be changed for each waypoint. This is a different behavior from Mission Hub v1. In this case, the drone orientation heading will match the flight path heading. Since the word “heading” can be used to indicate either the direction the drone is pointing as well as the direction the drone is traveling I’m trying to be as specific as possible.
1 Like
Can we get the aircraft/drone arrow pointing towards the POI? The aircraft will follow the path line, and the arrow can point towards POI.
Can we get a dotted line (or something) from both the waypoint (and the aircraft pointing towards the POI in simulation mode)?
I also have another POI that is offscreen, and there’s no visual indicator along the path/waypoint to indicate the aircraft arrow is going to point towards the POI.
“This drone model does not support Orbit/Spiral”
Why can’t the DJI Mini do an orbit?
It should be just the drone going in a circle with a POI in the middle.
Yes. As I explained earlier, you can’t do that with the heading mode set to “Follow path”. You have to set the global heading mode to “Custom”, then assign POIs to the waypoints.
Also, as I explained earlier, there is already a small arrow at each waypoint that will show you the direction the aircraft will point at that waypoint.
hope to add maps available in the Chinese region, currently VPN is still required.
The spiral function must be something that is supported in DJI’s MSDK v5. As a result, it can only be supported in a drone using the Litchi Pilot app. Your DJI Mini is supported in DJI’s MSDK v4 with the regular Litchi app.
While a spiral can be created with a POI and a number of waypoints, that is not how this function is implemented in Litchi. If you want to create a spiral in a Litchi mission for the DJI Mini, you could use my “Spiral Mission Creator” software.
Definitely an issues with batch editing on a couple things I’ve tried. Also if I add one additional waypoint in between two existing waypoints when the plan is set to curved path it sets it to straight path and cannot be change. I’ve tried batching editing with no luck and even if I select that one waypoint it indicates it’s already curved. I tried changing to straight and then back to curved but that one waypoint will not change.
A better UI particularly adding the mission preview which is very helpful. Still waiting patiently for everything to get up and running smoothly as a few things are still not working like POI’s during mission preview. I can add them but the mission preview doesn’t show the drone pointing at the POI, it just follows path.
1 Like
“Curved Turns” is a global setting. What you describe is probably due to the “Curve Size” at the new waypoint. Select the new waypoint, then under “Advanced”, change the curve size to a non-zero value.
This is most likely because you have the “Heading Mode” set to “Follow Path”. Change that to “Custom” and the POIs will affect the heading at the respective waypoints.