Really like the new grid feature and as far I tested, it works good! Great work!
I have a question about it. I tested it with a Dji Mini 3. It has 12 megapixel. If I would use a Mini 4 Pro (48 megapixel) and fly at the same height like the Mini 3 the ground sample should be different. Currently when I change my planned mission form Mini 3 to Mini 4 Pro there is no change in GSD. Or is my calculation wrong?
Currently calculations are made under the assumption that you use the 12MP setting (for drones that support both 12MP and 48MP). If there is demand we can take a look at adding support for 48MP.
Okay got it. Thank you. For me this Feature would be very usefull. Don’t know if it’s usefull for others. If I fly the Mini 4 would be cool to use it’s “full power”.
Something to check on this is whether you can effectively use 48 MP setting. I need to test again, but when I tried this using my Air 3s the time it takes for the drone to process (write the photo to the card) required me to slow the drone speed WAY down or it would just go past some points that should have a photo.
That’s true too. I think it should be possible to lower the interval a bit. With 48mp you should be able to use a higher altitude for same gsd so a higher interval to. But your right, that’s a point.
The new Flight Hub no longer zooms to the location of an imported CSV file. The import of the mission itself works. It is just that you must now manually navigate to the location of the imported mission.
Windows 10, Firefox.
Feature request: When creating a mapping mission using the “Above Ground” option, differentiate on the map which photo locations include a waypoint and which photo locations do not. Currently, one has to open the mission in the old mission hub to see the locations of all waypoints.
Feature request: It would be great if I can reorder waypoint directly on the Hub rather then needing to export it as a CSV file, reorder it then upload.
New Hub Update
Area Mapping
-
Added Import Mapping Area (advanced setting) — upload a KML or KMZ file to define the mapping area
-
Added Capture Mode setting — choose between taking photos or recording a video
-
Added Turn Radius setting (for Curved Turns) — set all curve sizes using a percentage
-
Custom gimbal angle is now supported for all drone models
-
When a photo is taken at a waypoint, its map marker is now displayed slightly larger
General
-
Flight names can no longer contain a slash (
/) when using older drone models -
Fixed an issue where importing a CSV did not move the map to the correct location
-
Other minor improvements and bug fixes
@vico and @Kaehn: Have you tried implementing DJI’s “multipleDistance” or “multipleTiming” action triggers in the KMZ output? In Litchi these are called “Photo Intervals”. I have tried setting up the following action trigger but the drone appears to ignore it. I was just wondering if you have had the same experience.
<wpml:actionGroup>
<wpml:actionGroupId>2</wpml:actionGroupId>
<wpml:actionGroupStartIndex>1</wpml:actionGroupStartIndex>
<wpml:actionGroupEndIndex>2</wpml:actionGroupEndIndex>
<wpml:actionGroupMode>sequence</wpml:actionGroupMode>
<wpml:actionTrigger>
<wpml:actionTriggerType>multipleDistance</wpml:actionTriggerType>
<wpml:actionTriggerParam>10</wpml:actionTriggerParam>
</wpml:actionTrigger>
<wpml:action>
<wpml:actionId>0</wpml:actionId>
<wpml:actionActuatorFunc>takePhoto</wpml:actionActuatorFunc>
<wpml:actionActuatorFuncParam>
<wpml:payloadPositionIndex>0</wpml:payloadPositionIndex>
<wpml:useGlobalPayloadLensIndex>0</wpml:useGlobalPayloadLensIndex>
</wpml:actionActuatorFuncParam>
</wpml:action>
</wpml:actionGroup>
Mapping Feature Request
-
Display both the FOV (diagonal) and FOV (horizontal) values for the chosen drone/camera.
-
Display the distance between photos and distance between paths.
-
Increase the precision of GSD to two decimal places.
Honestly the new Hub is fantastic! The only thing I miss is being able to modify the Z-check setting.
Great job dev team
The functionality called “z-check” in ancient.land is automated in Litchi’s new Mission Hub. When using the “above ground” mode, waypoints are only added when the ground elevation changes by more that one meter.
1 Like
We tested these with DJI Fly, but they don’t work since DJI has restricted most waypoint functions that aren’t directly tied to video shooting
Thanks for confirming that. In my tests, the drone only captured one photo at the end of the interval.
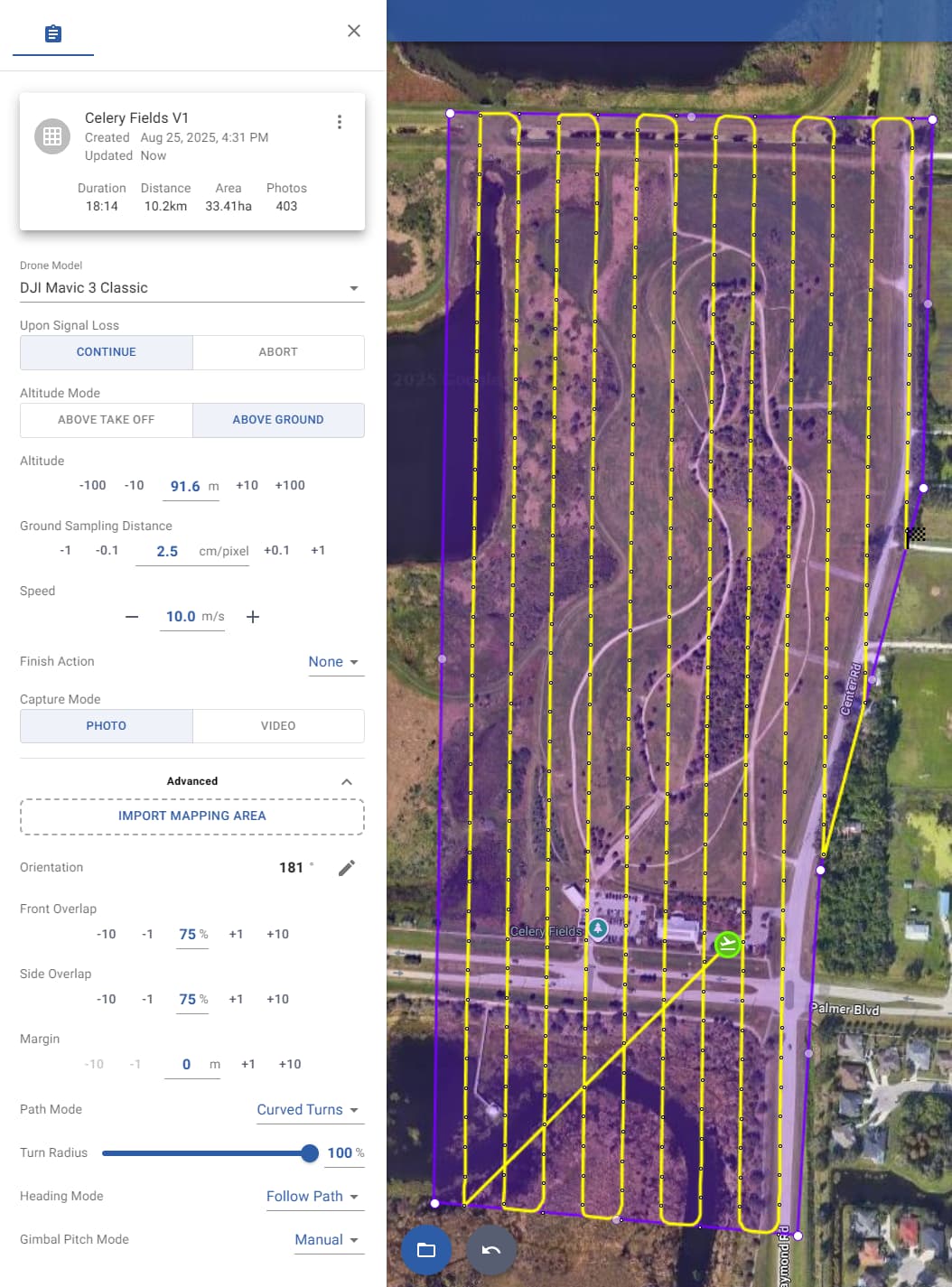
I got my Mavic 3 Classic a few days ago and flew my first area mapping test this morning with 2 missions overlapping each other, but one rotated 90 degrees to form a grid (I used DJI Fly of course). Each mission was only about 50 photos and seemed to work great. Then later I tried a larger grid mission with each one being around 300 photos, but had several issues that I’d like help with. When I load the mission and the drone goes to the first point it just immediately fails, but eventually it said something about more than 200 points, a limit I wasn’t aware of. I then tried splitting up the missions into <200 point flights, but then would have issues where it would just stop the flight at point 28 for some reason.
Is there an easy way to work around this point limit issue? I was using the “above ground” setting, but maybe that wasn’t a good idea either?
EDIT: I’ve done more research and testing and had trouble with a 150 point mission, but learned that there could be a gimbal pitch issue stopping it or a line trace limit? The total distance is around 8km so don’t think that’s it.
The Mavic 3 Classic can use one of three controllers: RC-N1, RC, or RC Pro. Which one are you using?
There is no hard limit on waypoints. Instead, the size of the mission is limited by device memory. I know of people flying 800+ waypoint missions using the RC Pro. However, the practical waypoint limit for the RC is around 200. It is not the number of waypoints that is the limiting factor. WPML is a rather verbose language. Waypoint actions add a lot of code to the mission. Without any actions, a 300 waypoint mission may be possible on the DJI RC. With actions, perhaps only 150 waypoints are possible.
To reduce the size of the mission, limit the actions to “Take Photo” at each waypoint. Remove the “Gimbal Tilt” action at each waypoint. Doing so will reduce the overall mission size and will give the RC a better chance of running the mission.
When exporting to KMZ, the use of the “Above Ground” option will make no difference to the number of waypoints used.
1 Like
Sorry, I should have mentioned that I’m using the RC Pro, soon to be modified RC Plus. I have take photo set, but also have gimbal tilt set to locked at 75 degrees. Should I change that to manual and just dial that in before the flight since the tilt never changes? Here’s how I have it now, with curved turns to maybe help it out. Never mind about the curved turns, I realized that’s not supported on KMZ export.
Then I’m a bit surprised because some of my colleagues have flown 800-waypoint missions using an RC Pro with only some minor delays. Although, those 800 waypoint missions were without taking a photo at each waypoint. Adding waypoint actions does add substantial code to the KMZ file.
That would be a good thing to try. Adding an action almost doubles the size of the code for a given waypoint.
"Curved Turns” is short for Litchi’s way of handling curved waypoint missions. DJI Fly can handle either “Straight Lines” or “Smooth Curves”. I would recommend “Straight Lines” for mapping missions.
I just tried running this with manual tilt and still could not get it to do anything other than going to the first point, taking a photo, then stopping the mission… I had backup versions that I split up into <100 point missions and just loaded them one after the other that worked fine, but way more work obviously.