If you mean how to program the mission then check the README tutorial on the GitHub page of this project but in Step 6 you need to uncheck the box that says “Camera top facing forward”, then in Advanced Settings tab (which you enable in the Simple tab) check the box that says Cross Grid, and continue following the tutorial.
Then in Litchi, before starting the mission set your camera to -45 before starting the mission, the camera should stay in the same position after you start the mission.
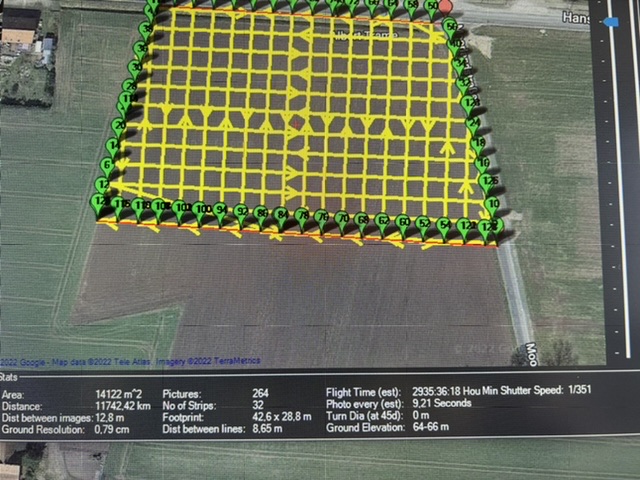
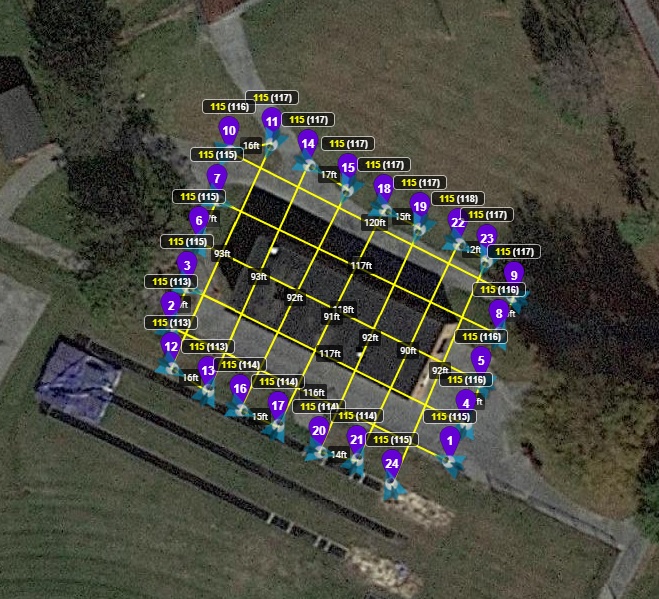
I would certainly welcome the ability to create a polygon of where I need the aircraft to fly, the height and overlap similar to what I can do with Autel Explorer. With Explorer I can create a flight plan in just a few minutes. The issue is that Explorer is nowhere as versatile as Litchi. At present with Litchi I have a spreadsheet that has the details for the various drones and their cameras and I enter a height and the required overlap. From this I manually create a grid with the various waypoints. It is somewhat time consuming but I have a number of master grids that on Litchi Hub I can just move to the location I need then save it with a new name.
“Make sure that the value in Mission Planner Survey Tool (Simple Tab) speed matches with the speed set in Litchi Settings (Mission Settings). If you want mission planner to use km/h or mp/h you can change that in mission planner settings tab.”
One thing I learned today is make sure in Litchi that auto Record is turned off. Did a mission today and could not figure out why it was recording short videos instead of pictures LOL
Was one of those old fart moments I guess.
Absolutely!! It’s why I got interested in Litchi in the first place - I thought it had the ability, and would make even my Mini 2 a powerful tool. Now I have the A2S and the Mavic 2 Pro, and would really like to have it.
That’s a bug in the new version of mission planner, with some setting that causes this to happen.
I would ignore it, unless Michael Oborne (Mission Planner developer) fixes this, just ignore the flight time in Mission Planner and refer to the one in Litchi, which after importing the converted mission will always be correct!
Most definitely, please and thank you! Litchi is very versatile as is but adding flight planning features similar to what Pix4DCapture and DroneDeploy provide would be a huge feather in the Litchi cap. Grids, Dual Grids, and Corridors created on the fly (flight controller) or desktop (Mission Hub) would augment the already robust waypoint planning. The work-around I use is mentioned in this post a few times, but it can be tedious and does not guarantee consistent forward \ side overlap. The only other app I’m aware of (written by DJI) that does this is “DJI Pilot PE”.
But, I don’t understand the lychee team and I’m starting to lose faith and hope in this team and program!
During the 1.5 years that I have been flying Drones, I do not see significant changes and improvements in this program.
And if I continue in the same plan, I will most likely be forced to switch to more convenient software.
P.S. I’m sorry, but it’s a fact. If a person pays for software, then there should be support, not in words and forums, but in fact and in the program.