@James1 Great work! Thank you for sharing with the pilot community.
I mention your website everytime I see a post on a forum asking about advice on mapping software. I love your web app.
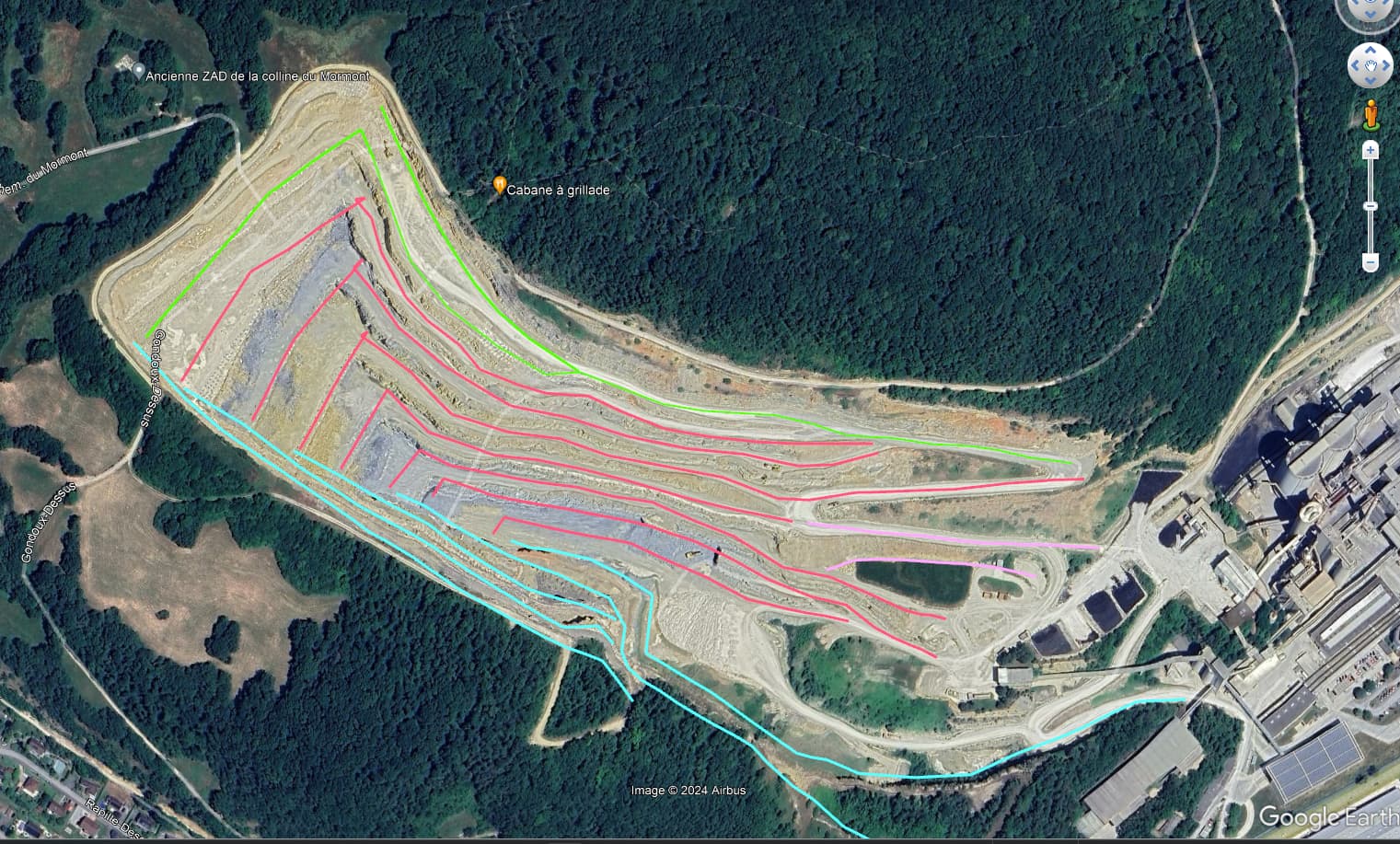
Would it be difficult to implement a linear feature mapping function? The user would draw the flight path as an open route rather than a closed polygon. The software would calculate the photo spacing based on the selected camera sensor and altitude.
I know doing this is possible directly in Litchi by manually adding waypoints using the click and drag method. Looking for a faster way. (might be similar to building facade mapping, but only 1 level, facing 0 or 90 degrees to the travel path.)
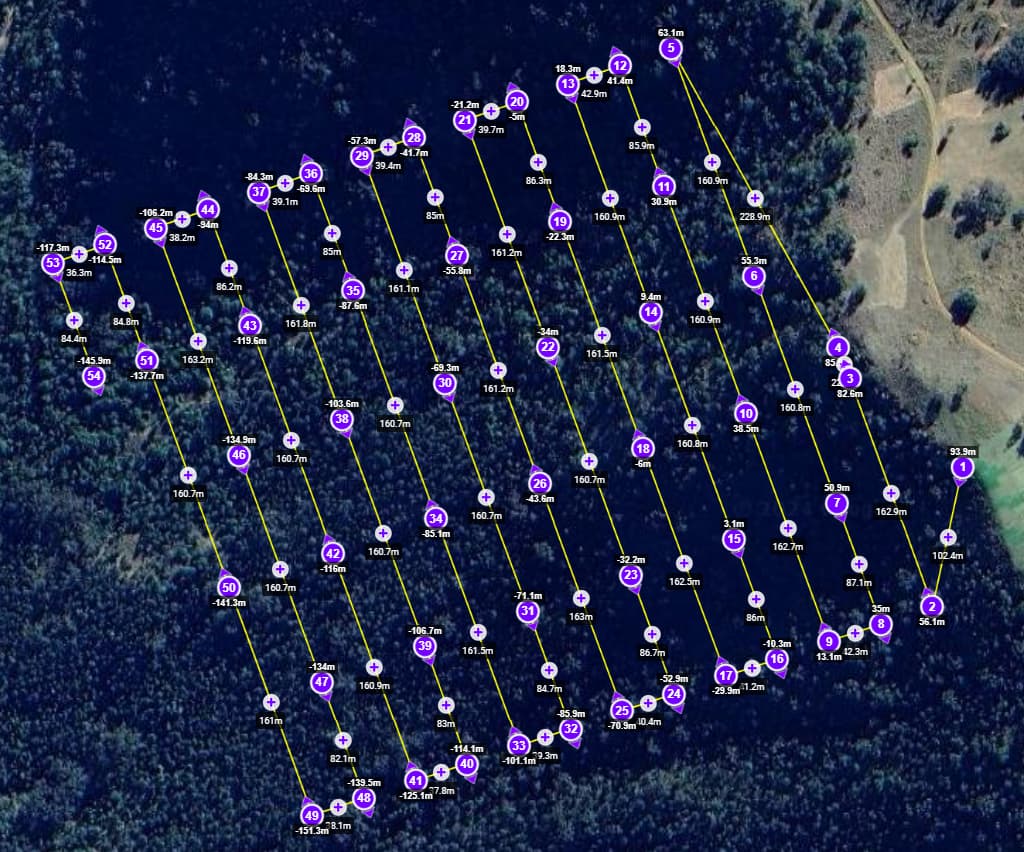
Second Image is trying to create contiguous flight plans using your mapping app and exporting intermediate steps with limited success. I have many corridor tracks to plan for mapping. I will evetually be making multiple actions at each point, 4, camera pitches.)
Hi James, I have tried to read as much as I can before asking this, but on low battery warning, is there a way to recall the drone, mid grid search for battery change & to redeploy it back to it’s last known grid position to restart the mission ?
There is no built-in option to do that. You would have to monitor both the battery level and the current waypoint then restart at the appropriate waypoint manually.
This tool is really great for making orthomosaics, thank you very much!
I wonder how much trouble it would be to add a sphere-shaped waypoint grid, for 3d photogrammetry of i.e. a building? I would help with the code if I can, if you have a git repo somewhere?
@James1 I would pay you for adding this, I’d rather pay you than the other paid mission planning platforms I’ve seen so far.
@Ethan_Arnold ,
Take a look at the Virtual Litchi Mission (desktop program). It has a Spiral tool that I have used to create a dome shaped mission for 3D mapping buildings.
Hi Sam, thanks for the hint.
Unfortunately I can’t use a Windows desktop program since I use only Linux.
I looked at the Chrome plugin (https://chromewebstore.google.com/detail/chrome-litchi-virtual-mis/ccpleclnjidgphbmhphdfeejfifeekak) which says it “does the same” as VLM but according to the description it simply displays a mission, exported from Litchi, in Google Earth, but says nothing about creating a mission for Litchi.
Does the desktop program have a different functionality?
Might be a dumb question, but when setting the GSD value. I’ve mainly been using that slider to get the altitude I want for a safe (and reasonably-timed) mission. Is this correct?
Yes I understand that. I guess my question is, when I export to Litchi should I be running the mission at exactly the altitude output on the GSD slider on the tool? Or can I “fudge” it a little and lower the altitude.
Of course, you can change the altitude of the waypoints in Litchi. Keep in mind, that it will lower the GSD (good thing) but it will also lower the image overlap (bad thing).