I noticed a very poor gimbal stabilization of my Air2S during a waypoint mission performed a moderately windy afternoon with gusts of about 15mph.
The lateral (horizontal) stability looks very deficient, ruining completely the video. This is particularly proeminent when the drone is climbing, receiving the wind by 1/4 laterally, less with wind almost backward with a rather horizontal flight.
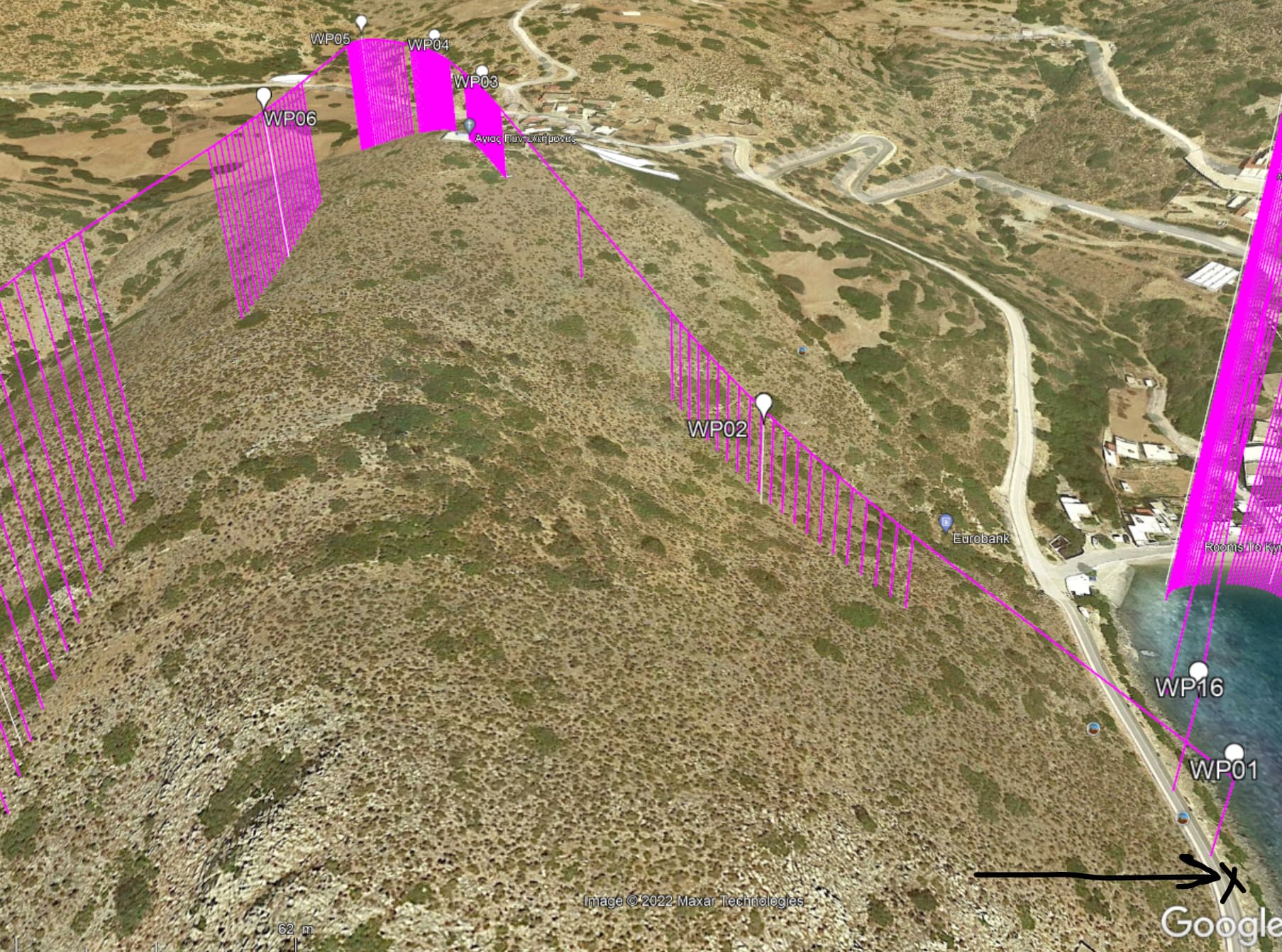
Look at the video which correspond to grossly waypoint 2/waypoint 6 of this mission :
During the phase of the mission which gave the video above I was located 50 to 200m from the drone with an excellent connection with it. The video corresponds to the flight from WP2 to past WP6 of the screenshot. The black arrow indicates the place I was standing up.
In a range of 50m I don’t need waypoints
And and do not observe this effect when I fly manually the same path, acting on the joysticks. The delays in the communication are identical.