Hi everyone,
I didn’t find an answer so let me ask here
Is there a way to quickly reverse/ switch the numbers of waypoints - e.g. I have a mission with 5 WP with settings on each, and want to duplicate the mission but in reverse order. Is it possible?
Is there quick way to divide created straight line between 2 WP to I.e. 99 equal parts ? - I need it to create hyperlapse with long exposure at night.
Answering number 2.
This is not quite quick but it will gives you equal distance.
Just make 2 separate wp. Then click on the first wp. If you click insert it will make new wp at exact half distance between two previous wp.
With this trick you can insert another wp at exact midway of 2 random wp.
I know that - you are describing me the most basic function. So it’s definitely not quick because you need to click on every WP and click the “plus” icon I.e. 50 times
I was referring to Safrudin answer.
I will look into these two things you mentioned. As I understand in that options there is a chance to easy set this settings what I’m talking about ?
I just updated the Air 2S firmaway today, 2022.03.26 using DJI Assistant 2 and the new firmway I got is: V02.04.2130. Remote Controller also updated to V04.12.00.56 using DJI Assistant 2
Litchi v4.22.0-g on Android.
While doing a Test Waypoint which I did several times before I noticed that the hight of the 1st Waypoint set equal to the hight above ground at that point is not correct. Instead the hights of all waypoints are related to the hight where the aircraft ( Air 2S ) took off ( Home Point ). This is definitevely not the case with my other drone, the DJI Spark. For DJI Spark all hights are measured relative to the hight above ground of the 1st waypoint.
Did somebody experienced this issues ? Is there a workaround to correct this ?
For an answer, many thanks in advance.
Viky
thanks for your feedback.
But still, in my opinion, if in Litchi Hub when setting the 1st wp I also activate the “above the ground” feature for the hight of this 1st wp then the Spark adjusted it’s hight when reaching this 1st wp ( I start the flight on a slope ). I checked this in earlier Spark log files.
Now, for Air 2S, even so I use the same waypoint mission, when I open the log file I see that is no hight variation from HP to WP1.
The drone cannot know the altitude set in the program.
At the time of launch, the drone always initializes the altitude to 0 meters. If you are taking off from the ground it will be 0. If you are taking off from a tall building it will also be 0. Litchi simply adds the mission altitude setting and determines whether the drone should take off or descend if the altitude is set to negative.
Dji fly and dji go4 displays height using the same algorithm
I now repated the same Test Flight but with option VPS set to < OFF > in Litchi. The Mission hight was correct in this case. However was a much more windy day compared to previous flight.
In Log file I also remarked that it was a much better correlation between IMU and VPS hight values. That was not the case during the previous flight. I mention that I didn’t do any kind of IMU or VPS Calibration between this flights.
I tend to rely more on the IMU Hight in the future.
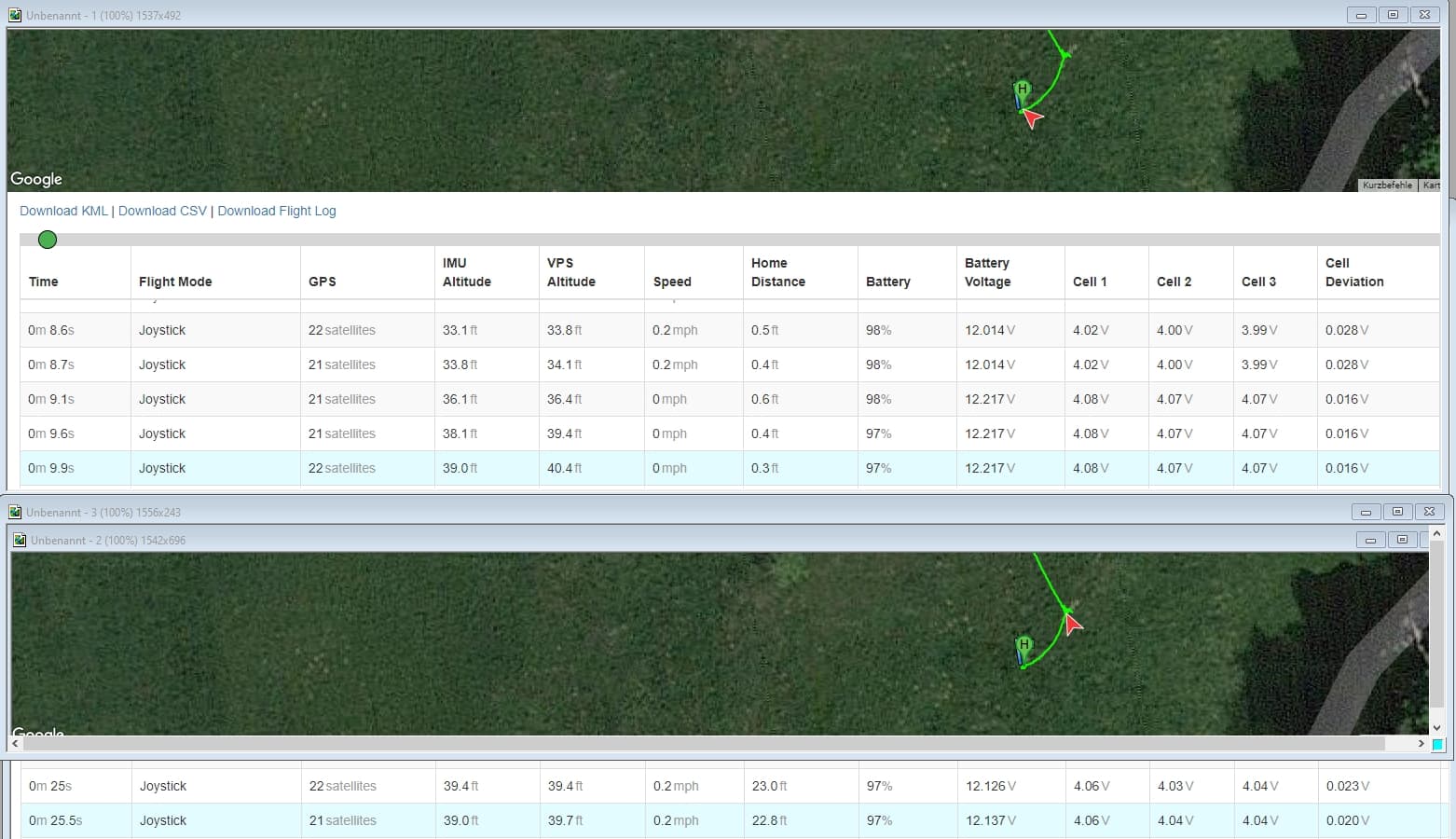
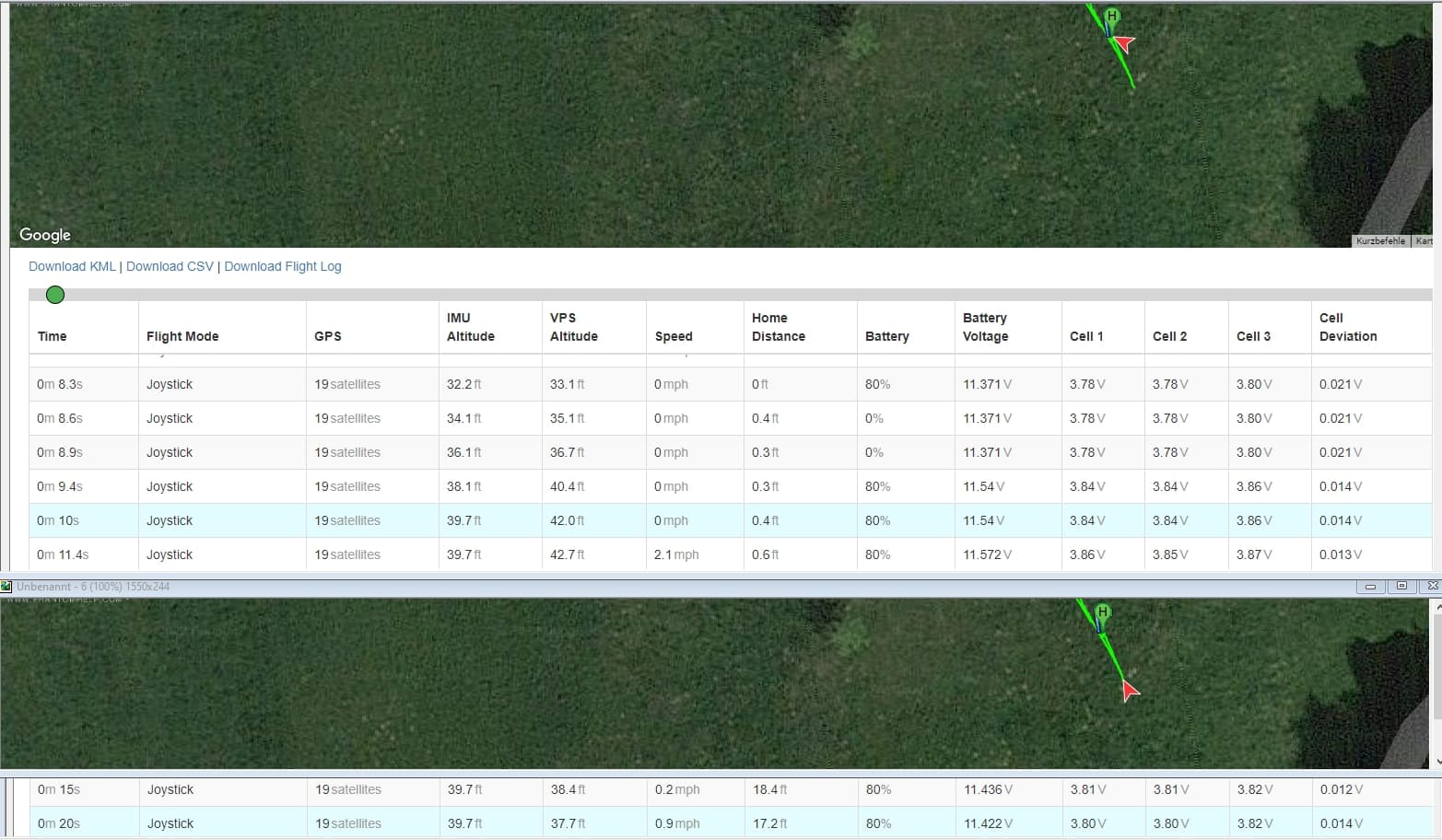
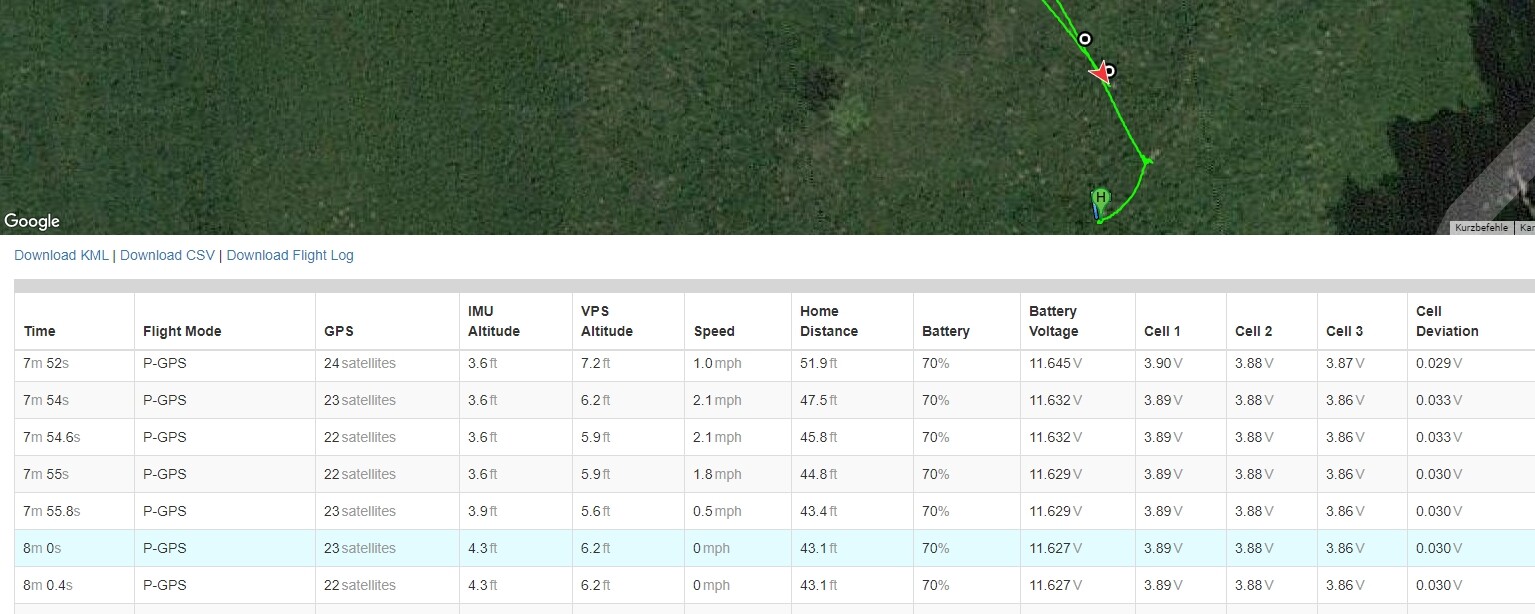
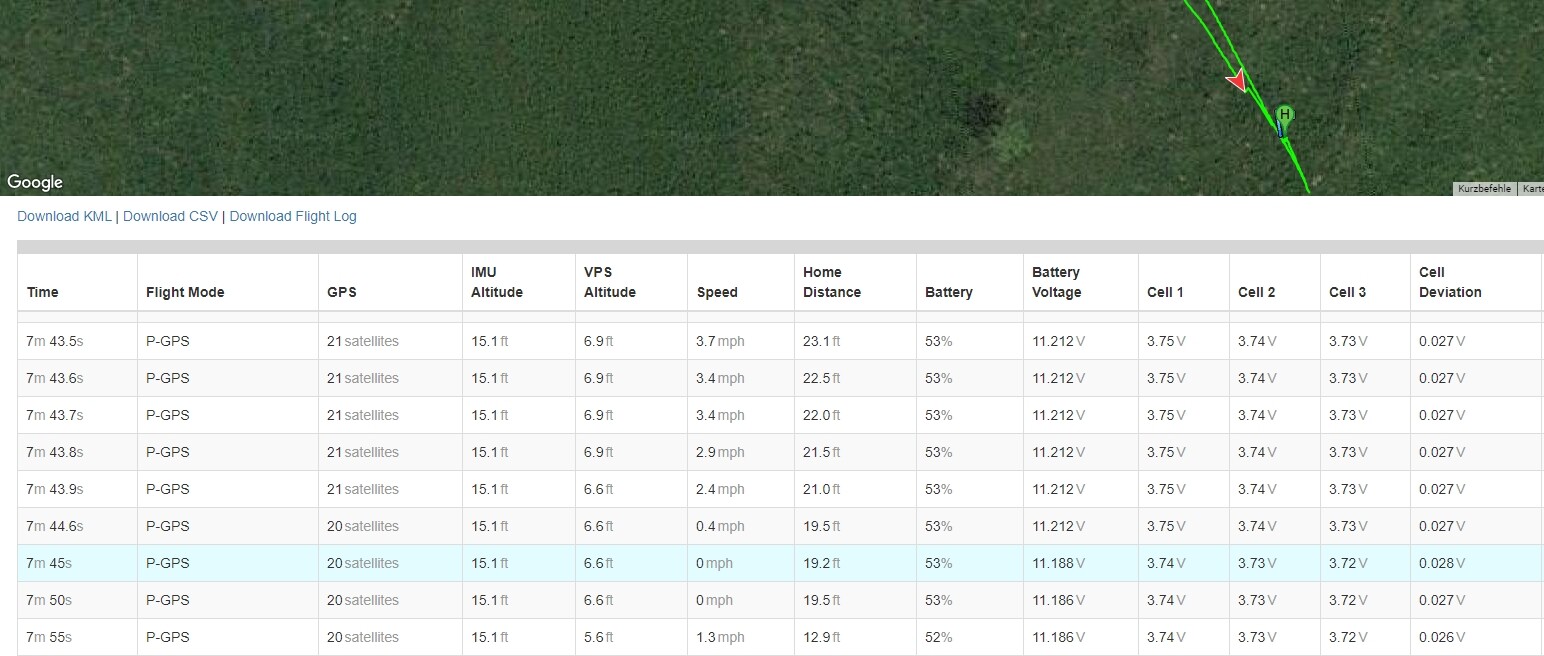
Hier is a screen shot with the recorded IMU & VPS hights at both HP WP1 for current flight:
And hier a screen shot for recorded HP & WP1 hights for prevous flight where VPS option was set to < ON > in Litchi. Hier the correlation is not so good: