See how it works!
See how it works!
That is incorrect. Focus POI is a gimbal pitch mode setting that only determines the gimbal pitch angle. Don’t confuse this setting with the point of interest setting where you can select a POI.
Where in the screenshots above did you see the poi setting? I don’t see one.
They are in the settings dialog for each waypoint. You are confusing what those two settings do. If you still don’t understand you should probably visit the user guide. They are described there.
I asked the author to show a screenshot of these settings.
what is the differenz between the heading modes in the mission settings?
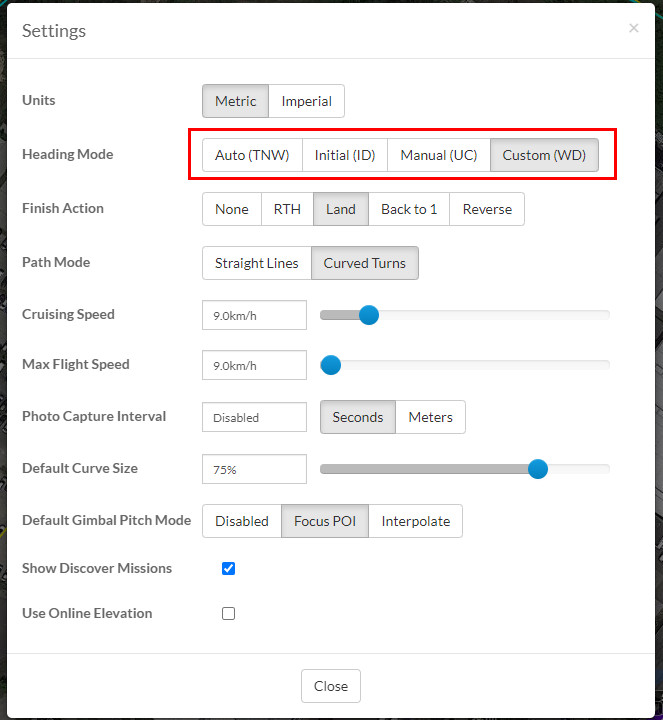
From the online Litchi manual:
Heading Mode: Defines the heading of the aircraft during the mission. Choose between “Toward next Waypoint” (“Auto” on iOS) where the aircraft will point toward the next waypoint, “Initial Direction” (“Initial” on iOS) where the aircraft will keep the heading it has when the mission is started, “User Controlled” (“Manual” on iOS) where you are able to control the heading of the aircraft during the mission using the left joystick left/right (mode 2) or “Waypoint Defined” (“Custom” on iOS) where the aircraft will use the heading defined at each waypoint. Using “Waypoint Defined” (“Custom” on iOS) also means that the aircraft will smoothly transition from one waypoint’s heading to the next.
I’m beginning to think ‘mimamo’ has flown this mission just once and was just a fluke, like I wrote before.
And as I wrote before:
I moved this mission (which he shared here) in the mission hub to a place near me and executed it, also with a Mavic Air, it went flawless.
‘bpa’ keeps on whining for screenshots while he could just look at the shared mission.
I’m convinced he’s now gonna say he wants it from the phone, not the hub, like something is magically gonna change during the sync process.
Ooh dude you think too much of yourself
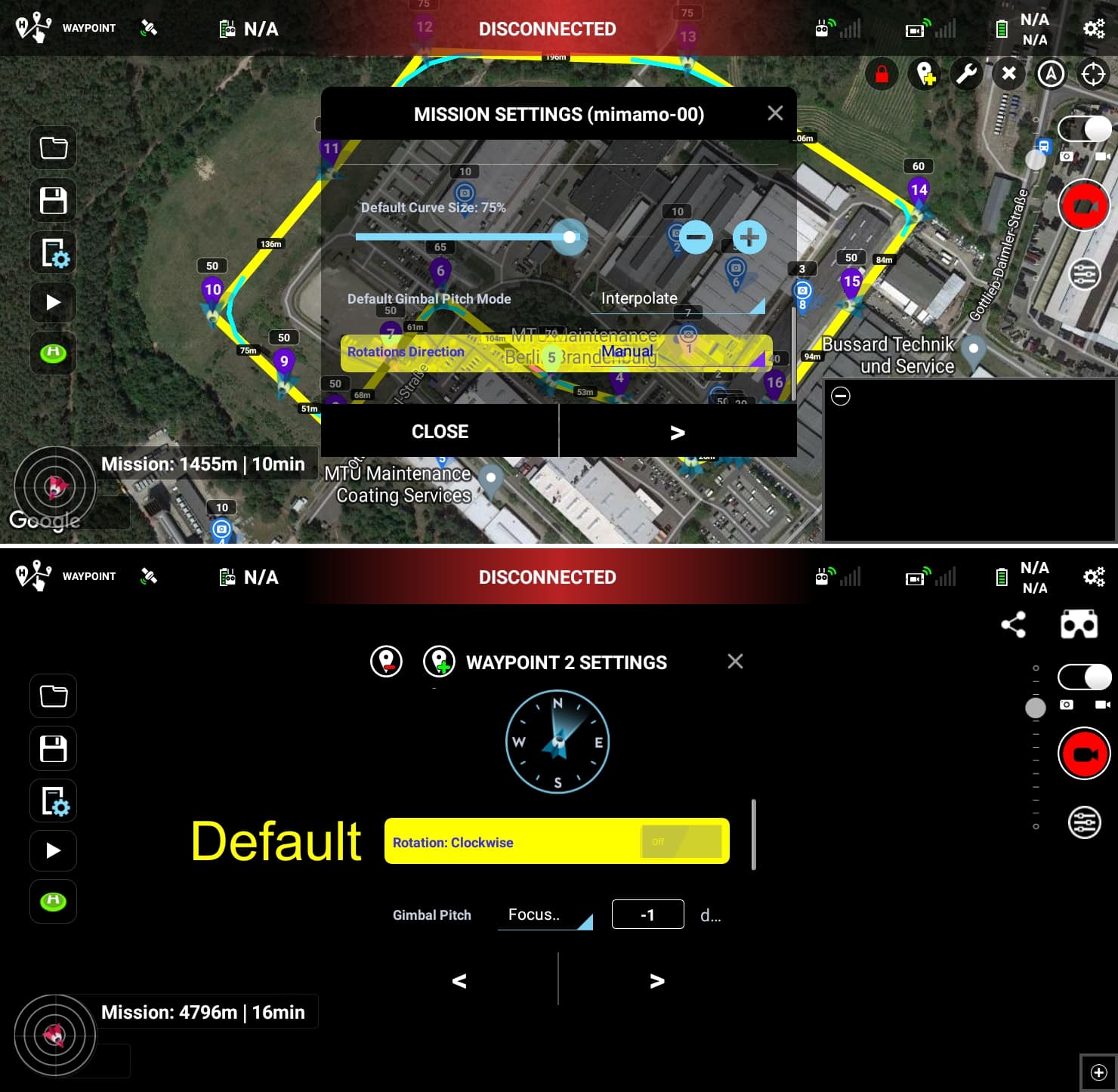
Check out my mission settings and drone direction in wp1 and wp2.

Why do you think the drone is tracking poi? ![]()
Actual cause of spinning drone (and a fact I did not know about).
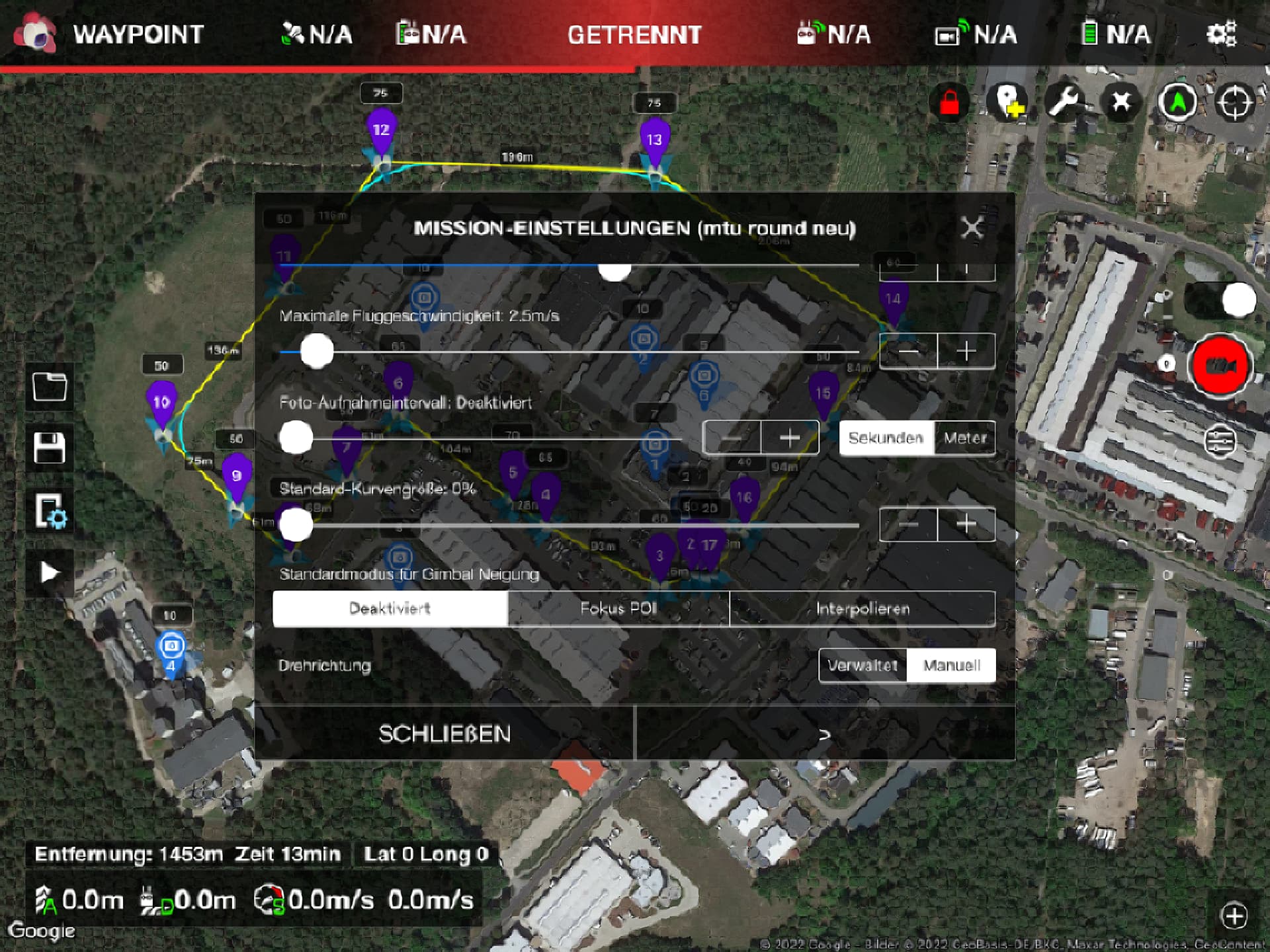
In Mission Settings in the App there’s 1 Setting NOT available in the Hub:
-‘Rotation Direction’ (Managed (Default) or Manual)
Consequently there’s 1 Waypoint Setting NOT available in the Hub:
-‘Rotation’ (Clockwise (default) or Anticlockwise)
When ‘Rotation Direction’ in Mission Settings is set to Managed, the drone takes the smallest turn-angle between 2 waypoints. This can be CW (ClockWise) or CCW (CounterClockWise).
So when you set ALL waypoints to either CW (default) or CCW, situations can occur where the drones keeps spinning around.
This can/will happen when you plan a mission in the Hub, then in the App you change the Mission Setting ‘Rotation Direction’ from Managed to Manual. As a consequence ALL waypoints will default to Clockwise.
In the Case of mimamo, Rotation Direction is set to Manual and ALL waypoints to Clockwise.
From WP4(59°) to WP5(46°): 347° CW
From WP5(46°) to WP6(23°): 337° CW
From WP6(23°) to WP7(155°): 123° CW
From WP7(155°) to WP8(110°): 315° CW
From WP8(110°) to WP9(200°): 90° CW
From WP9(200°) to WP10(178°): 22° CW
From WP10(178°) to WP11(109°): 291° CW
That’s a total of 1525° or just over 4 complete CW rotations.
Your comment to which I first responded mentioned “Focus POI”. From that point your comments jumped around to several different features of missions including heading (where the drone is pointing). I pointed out that the term “Focus POI” refers to the gimbal pitch angle. If you want to discuss this you will need to be more specific with the terminology you are using and stop jumping around to other mission settings.
Please see the Litchi user guide then click on “Waypoint”’, then search on the page for the phrase “Focus POI” (the phrase you used). Do you see the user guide talk about the gimbal pitch angle or the heading?
Report back what you find.
Finally you figured it out. I’m already tired of hinting about it
Now do you see the answer to your question? Or will you continue to feed us settings in the hub?
This is genius. Now you yourself attach screenshots from the program, but not from the hub.
Yes, and I’m very proud of you.
But you still didn’t come up with an actual and usefull answer to the ‘problem’.
I didn’t watch the mission. But the author never posted his screenshot from the phone.
Because it is from the phone that he launches his drone, but not from the computer and the mission hub. I also agree that he ran once and did not try to run this mission again.