I’m more into still photography than video at this point, so looking to leverage the waypoint capability using Mission Hub for creation. In short, I want to proceed to a waypoint, aim at a poi, take a photo, aim at the next waypoint, and repeat n times, potentially taking pics of n poi’s.
I’ve run some simple trials, understand about no actions with curves, but that’s not an issue because I’m not looking for smoothness in transition, just move expeditiously to the next waypoint, with my Air 2S pointed at the next waypoint, in order to sense obstacles. I’m afraid if I let it proceed without aiming it may travel sideways and hit something, therefore the need to rotate.
So far the solutions I’ve come up with are awkward, in that after snapping the photo I have to manually rotate the drone to aim it at the next waypoint. Any slicker approaches, so that I can have the Air 2S shoot the poi and then automatically rotate toward the next waypoint?
I think there is an easier way of asking this question. If I set the heading option in Mission Settings to Auto(toward next waypoint), can I stop the drone at a waypoint, have it rotate to aim at the POI and take a photo, and then proceed toward the next waypoint properly oriented (i.e., “forward”)? This would assume the POI aim would override the mission settings long enough for a photograph.
In the Mission Hub, setup your mission with:
-Heading Mode: Custom (WD)
-Path Mode: Straight Lines
-Defautl Gimbal Pitch Mode: Focus POI
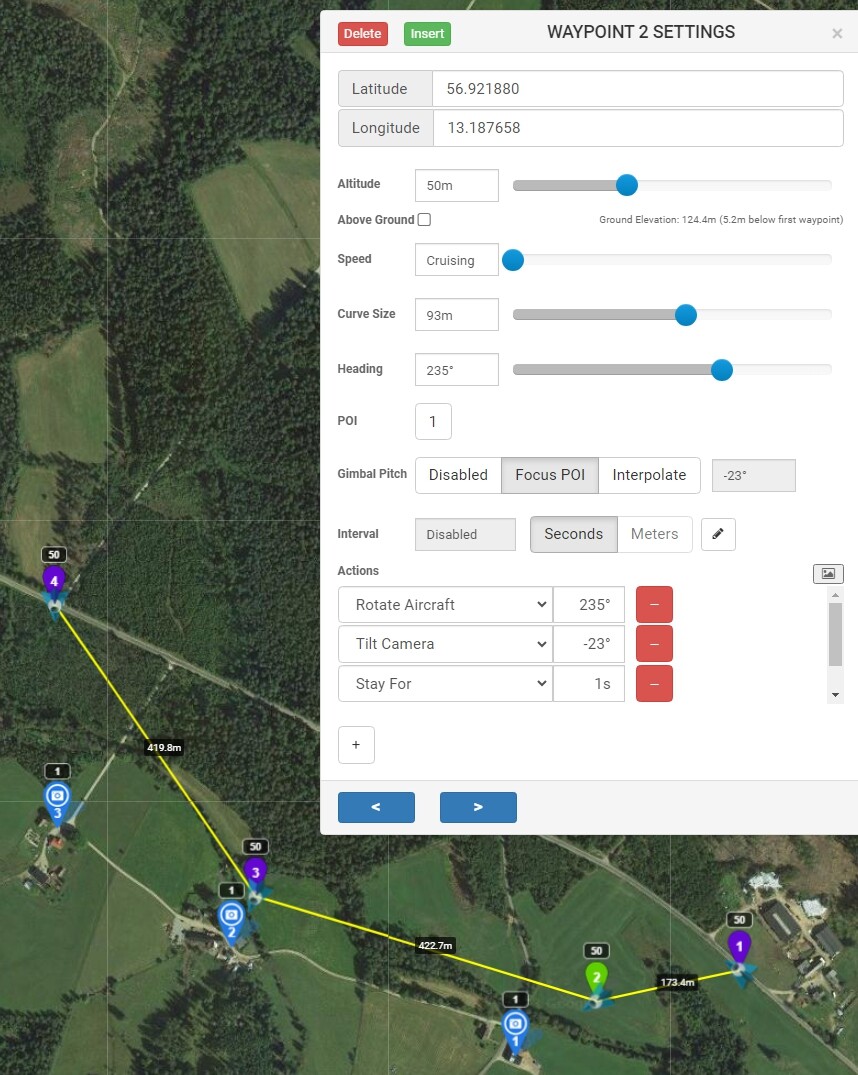
Then in Waypoint Settings:
-Select the right POI
Add the following Actions:
-Rotate Aircraft (Fill in the heading from the Heading Slider)
-Tilt Camera (Fill in the angle from Gimbal Pitch)
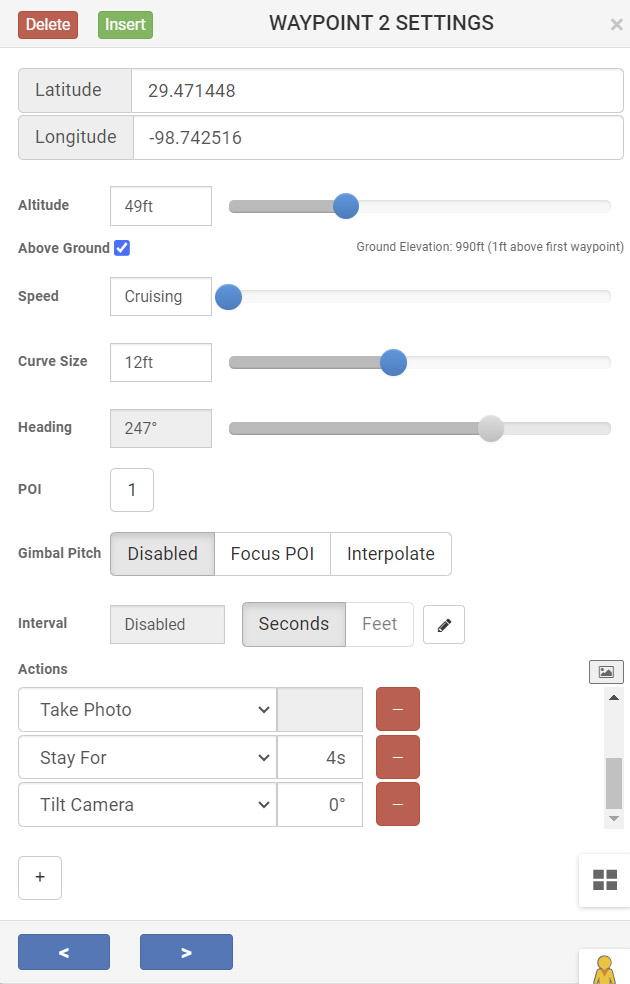
-Stay For 1s
-Take Photo
-Stay For 2s
-Tilt Camera (any suitable angle)
Neat, using custom wd and focus poi to generate numbers for manual entry, and then changing to auto tnw. Not as “automated” as I had hoped, but does achieve everything I wanted. Thanks a bunch.
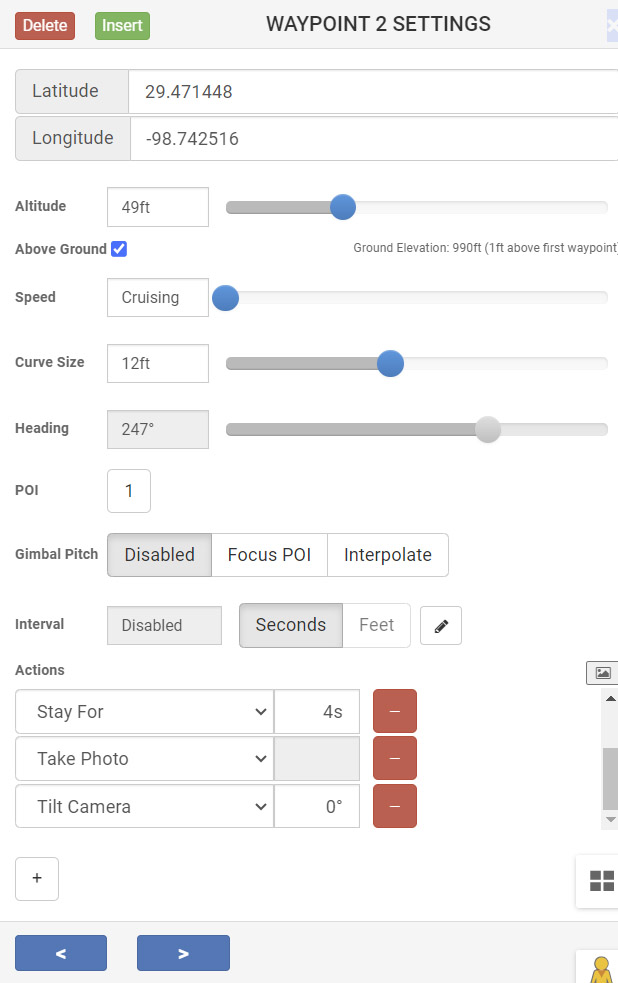
On my first trial using Tribar’s approach I ran into a problem, the photos weren’t aimed correctly. Heading was ok but gimbal pitch was way off, shooting high. I first put in more time prior to the photo snap, but that didn’t help.
After some head scratching I inserted a delay after the photo snap before returning the gimbal to 0. This solved the problem, apparently the command to take a photo isn’t processed fast enough before the next action, which was to set the gimbal back to horizontal. Not sure if this is a Litchi problem or some sort of pipe line delay in the drone. In any event with the addition of a short wait after the take photo command all is working as expected.
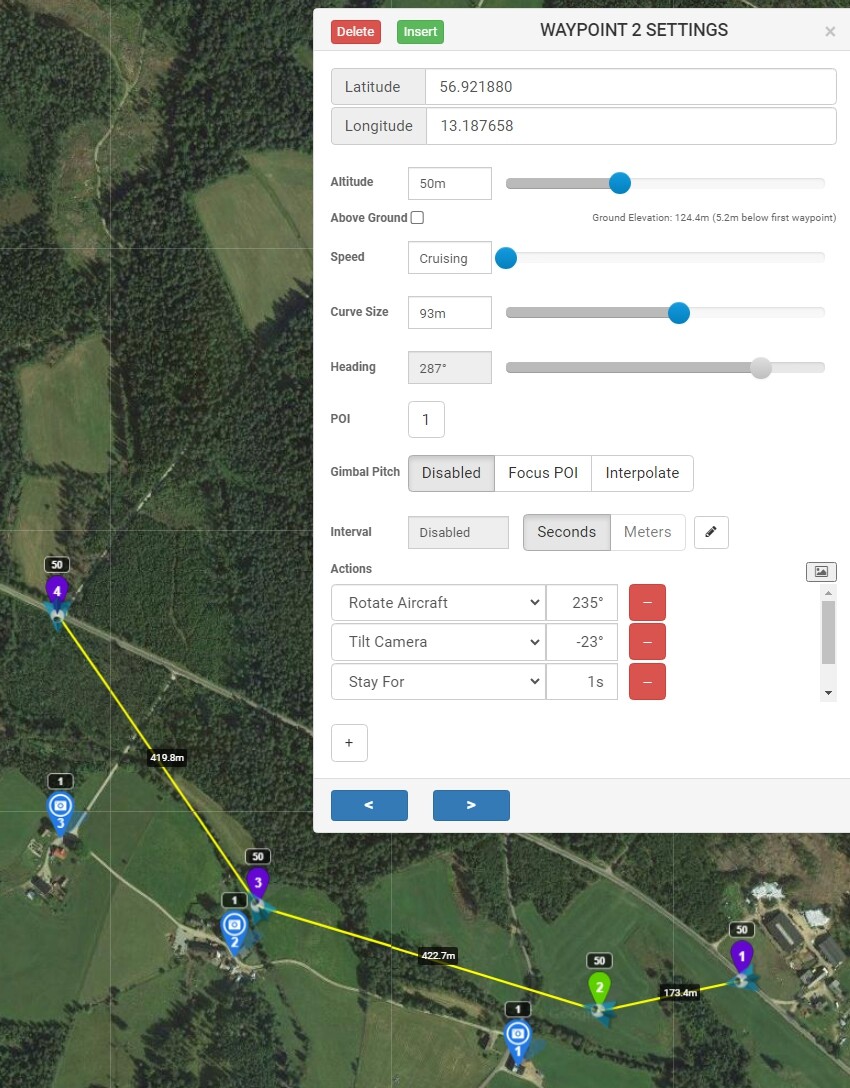
I’ve noticed another anomaly. In the initial phase, when Heading Mode is set to Custom(WD), the heading field doesn’t update as the waypoint is dragged to a new location. One has to click another waypoint, and then come back to the original to get a new heading number. The gimbal pitch angle does update during the drag.
This is apparently a Litchi bug. The aircraft symbol rotates to continually point toward the POI during dragging, but the number doesn’t update. What is the mechanism to report a bug? BTW, I’m using the Chrome browser.
Now that you mention this, I checked the Litchi app for this and notice the same anomaly in the Litchi app v4.26.3_Beta-g & 2.14.3-iOS where not only Heading but also Gimbal Pitch is affected.
Create a topic in the “Known Issues with current release versions” section.