Have flown my test mission several times but now mode changes to Joystick and aircraft stops at first waypoint and mission ends. Not sure what is going on.
@bcmacman ,
What drone? What environment (open field, urban, flat, hilly, etc)? What distance was the 1st waypoint from your home position?
Without knowing some additional details, its impossible to tell.
It would also help if you will share the mission and the flight log.
Here is some helpful info.
And at the way at the bottom of this next screen, you should see
Getting Help With Your Flight Logs
Upload here, then others can view the log info.
Just learning, sorry. Drone: A2S; Enviro: Hilly; Distance from Home: 30-35 ft. I will have to learn how to post mission and flight log. I’m not the brightest light on the tree but eventually I catch on…well, my wife might disagree! LOL!
No problem. We have all been new pilots at one time.
Its odd that your Air 2S would have problems that close to you and the controller.
Here is some info about the Air 2S and other drones that use Virtual Stick Commands (VSC).
Virtual Stick Commands are control signals constantly send from the remote controller to the drone (stick simulations), and feedback signals constantly send from the drone to the remote controller.
They depend heavily on a Constant Good control signal.
DJI Drones that are build for the DJI Fly App are controlled by VSC during waypoint missions. (Mini-1-2-SE, Air-2-2S & (Mavic-3, Mini-3))
Older DJI drones are not, they fly by themselves.
They also have an extra AIRCRAFT Setting:
“Exit Waypoint Mission on Signal Loss: Off/On”
Waypoint Missions are NOT drone depended.
When a mission is used with an older drone, it gets uploaded to the drone the moment you hit Start. When the upload is completed, the drone will take off and flies the mission fully autonomous.
If you would turn off the remote controller after take off, the drone is still able to complete the entire mission when ‘AIRCRAFT’ setting ‘Exit Waypoint Mission on Signal Loss’ is set to ‘Off’.
When ‘AIRCRAFT’ setting ‘Exit Waypoint Mission on Signal Loss’ is set to ‘On’, the drone will initiate the set ‘Signal Lost Behavior’ i.e. ‘Hover’, ‘Landing’ or ‘Return to Home’…
When the same mission is used with a newer drone (VSC-drone), it’s controlled by VSC the moment you hit start and takes off immediately.
The ‘AIRCRAFT’ setting ‘Exit Waypoint Mission on Signal Loss’ is not available with these type of drones (VSC-drones).
VSC:
Every 10th of a second (I believe it is) Litchi sends a control signal with tasks to the drone, so the drone knows what to do, then the drone sends a feedback signal to Litchi, so litchi knows if the drone executed these tasks and were executed correctly, now Litchi can workd out the next set of tasks to send to the drone.
When either of these signals do not arive at their destination, even for 1/10 of a second, trouble starts, like strange behaviour of the drone.
When this interruption takes too long (Signal lost), the mission is aborted and either ‘Return to Home’, ‘Hover’ or ‘Landing’ will initiate depending on the AIRCARFT Setting ‘Signal Lost Behavior’.
Don’t confuse Control Signal with Video Feed Signal.
Very informative. Thank-you. FYI, right after my initial post, I flew the mission again…and it worked! . I really don’t get it, yet. And it showed ‘Joy Stick.’
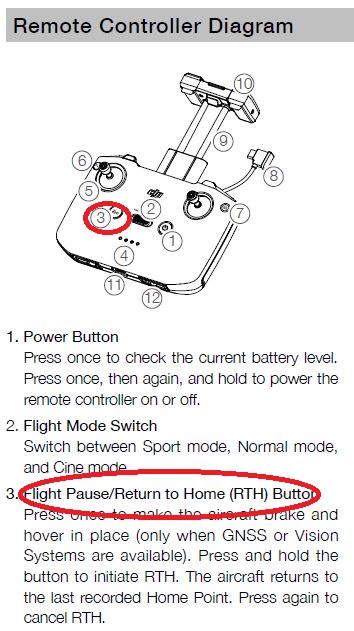
If you have the RC-N1 controller, its possible that you accidentally hit the Pause Flight button. I have an Air 2S and I have to be careful of that button. It will cause your mission to Pause.
1 Like
I just recently popped for the RC Pro so I am learning that also. Tech overload!!
@bcmacman Check out this post by @wesbarris and read the bottom paragraph closely.
wesbarrisLeader
Yes, “Virtual Joystick” commands can be differentiated from “normal” flying by looking at the log files. If you view your flight logs using the “PhantomHelp” web site, you will see the “Flight Mode” column. This column displays the corresponding flight mode. Here is an example of one of my missions just before (and immediately after) I executed a waypoint mission using and Air 2s.
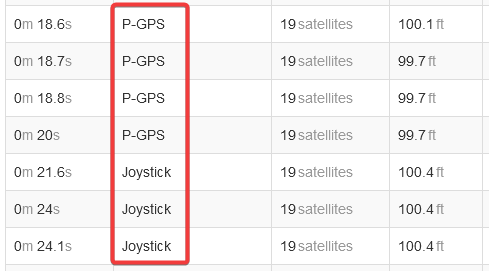
Notice that prior to the waypoint mission, the drone was in “P-GPS” mode – normal flying. Then, once the waypoint mission began, the drone was in “Joystick” mode – waypoint mission flying.
2