The default cruise speed assigned by Litchi for all waypoint missions created with the Litchi Mission Hub is 17.9 mph unless otherwise specified by the user. The entire cumulative distance of over 2,300 miles that my drone fleet has covered whilst flying Litchi waypoint missions was traversed at that default 17.9 mph because I assumed it to have been empirically determined to be the optimal airspeed for most hobby-grade quadcopters.
In other words, my presumption has been that increasing the cruise speed of my Litchi waypoint missions above 17.9 mph would result in the drone consuming more battery power per unit distance, which would translate into the drone covering less total distance per full battery charge, due to the increased battery consumption at faster speeds, coupled with the increased aerodynamic drag induced on the airframe by the greater wind resistance the drone would experience at faster speeds.
Just today, however, I stumbled on a discussion in the Mavic Pilots Forum dating back to 2017, that dwelt on the subject of a Mavic Pro1’s optimal cruise speed needed to maximize the overall round-trip distance covered per battery charge.
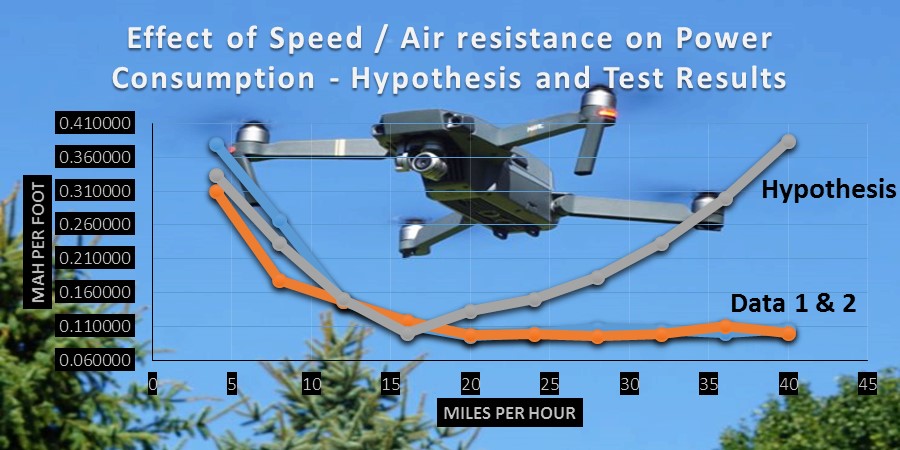
The graph above caught my attention, despite it being the result of research conducted by middle school students. The upshot of the graph is that battery drain does NOT increase linearly with a Mavic Pro1 drone’s airspeed, meaning that battery longevity will NOT be appreciably reduced if the drone flies any given Litchi waypoint mission at say 25 mph as opposed to the 17.9 mph that Litchi sets as the default cruise speed for its waypoint missions.
To me, this is an earth-shaking revelation that has the potential to increase the maximum round-trip distance covered by my Mavic Pro1 from 6 miles to 7.5 miles per full battery charge. That additional 1.5 miles of distance my drone can theoretically cover per full battery charge, attainable by flying at 23 miles per hour, significantly expands the reach of my drone well beyond what I imagined to be possible.
I am writing about this discovery because I am curious to hear from other Litchi users whether they retain Litchi’s 17.9 mph, or assign their own higher speeds as a matter of routine, without incurring any increased battery drainage and attainable mileage penalties due to selecting that higher speed. Any thoughts that can be shared about this question would be greatly appreciated.
There is no default cruising speed. The default speed of your mission is whatever you set it to in the Settings dialog. Whatever you set it to will be the default for the next mission you create unless you change it. The appropriate cruising speed should be determined per mission and how close (or far) from the ground you are flying or whatever makes sense for your mission.
For such a long time I have hobbled my drones with this major misconception I’ve had that Litchi had compelling reasons to select 17.9 mph as the cruise speed. The thing is, if one selects “cruise” in the setting menu of the Litchi Mission Hub, that 17.9 mph is the speed assigned for the mission. So I went with that under the assumption that I was maximizing battery duration by leaving the speed slider untouched.
I’ve been drawing up a bunch of new flight plans to try out as soon as this line of tropical storms rolls through, but with the speed adjusted to 25 mph this time. I am convinced that I ought to be able to launch Litchi Missions that will cover 8 miles round trip, as opposed to the 6 miles I assumed to be the greatest round-trip distance possible on a single battery charge.
You just cleared up a second major misconception I’ve held for a long time, Paxxa. While I was aware that the drone’s airspeed increases as the nose goes down like any rotary-wing aircraft, I wrongly assumed that the props would need to spin faster as well, so as to compensate for a loss of altitude that I thought would occur when the nose tips down.
My home flight sim is based on Microsoft Flight Simulator 2004, replete with a cyclic made by G-Stick III, a Flight Link collective with a twist-grip throttle, and Saitek anti-torque (rudder) pedals. In my virtual Robinson R22 helicopter, transitioning from a stable hover to forward flight entailed nudging the cyclic forward a hair while applying throttle and raising the collective slightly to maintain altitude. I thus expected a quadcopter drone to also require a gradual throttle increase as the nose is lowered a couple of degrees down to go faster.
Had I been aware of these unique quadcopter aerodynamic facts before today, my cumulative distance covered flying Litchi missions would have been way higher than the 2,300 miles that I considered to be such an accomplishment before I finally realized that I’d been making a whole slew of wrong assumptions about the flight of drones.
I’m not sure but I think you might be confusing setting the cruising speed in the overall mission settings dialog to setting a custom speed for specific waypoints in the waypoint dialog. There is no “cruise” setting in the setting menu of the mission hub. Instead, there is a “Cruising Speed” slider where you choose the overall mission speed. Then, in each waypoint dialog, if you leave the speed set to “Cruising”, that waypoint will continue to use the overall mission speed set in the main setting dialog.
Yes, the “Cruising Speed” slider in the settings menu is the one I previously assumed to have been set by Litchi at 17.9 mph, but I’m beginning to consider the possibility that I might have inadvertently set that speed myself a while back and thereafter wrongly assumed that speed to have been set by Litchi default.
I can’t believe I wallowed in ignorance for so long and then only today happened upon this realization that 25 mph would have been a much better speed selection that would enable the drone to cover a far greater distance than has been the case at the sedate 17.9 mph I felt obliged to use all this time, without depleting the battery charge level any faster.
From my experience: the RTH speed is the most economic speed and differs for almost each drone model.
I don’t know if you can find this speed in the Specs of the drone, but you can read it off the screen during a RTH when there’s (almost) no wind.
No, Rotation speed of the motors depends wanted flying speed & wind resistant.
Increasing the angle of inclination at the same rotation speed will decrease lift, the drone will descent.
I’m going to give this idea a shot. Send the drone out a ways, hit RTH, and note the speed at which the Mavic flies back. Much thanks for this idea, TriBar. Never crossed my mind to try this basic test.
Quit already.
The speed of the drone is set in the firmware in degrees (tilt atti range), and is also regulated in degrees. If a standard angle of 15 degrees gives a speed of 20 km / h, in normal mode, then by changing the angle by 20-30 degrees, we get a speed of 30-40 km / h for all intelligent modes.
Cruise speed is just the default global speed for the mission, it has nothing to do with the capabilities of the drone. Quite convenient if you need to change the speed of the entire mission
Ultimately, I may need to run some flight tests of say 15 minutes duration, while varying the speed incrementally and noting battery levels on landing. First I’ll check the RTH default speed as well to see how that compares with my informal experimental results.
I’m hoping to see that I’ll be able to get away with flying these Mavic Pros at 25 mph without taking a hit in battery duration, as suggested by the graph that I copied and posted from the Mavic Pilots forum.
In between tropical rainstorms when the air was still, I launched my first test flight with the Mavic Pro cruising at 25 mph instead of the sedate 17.9 mph I’ve used all along until now, and suffice to say the test was a phenomenal success.
This round trip of 6.6 miles was covered by the drone in a scant 15 minutes, with the battery level still at a healthy 30%. Considering that all my previous flights never exceeded 6 miles, after which the drone typically arrived at the launch point with a nail-biting battery level of between 15 and 20%, I can now affirm that this Mavic Pro drone does in fact utilize battery power way more efficiently at 25 mph then is the case at 17.9 mph.
With these surprisingly economical battery consumption figures in mind, I am certain that an 8-mile round trip Litchi mission will become the new standard distance covered during all my future sorties, at the conclusion of which I expect to see battery levels in the region of 20%.
For me, this is a monumental breakthrough, given my obsession with racking up as much mileage per flight plan as is feasible within the limitations of the battery capacity. The graph that I copied further up this page, which quantifies a Mavic Pro’s battery charge level depletion as a function of airspeed, has now been demonstrated to be accurate in practical terms. There’ll be more ambitious flight tests to come, and I’ll be back here with updates as weather permits.
My conclusion is therefore as follows: Yeeeeeeehaw ! Over and out for now.
I wouldn’t dare exceed visual range if I were flying a drone in FAA airspace stateside or under CAA jurisdiction within the EU, but out here in my Third World backwater, drone legislation is mercifully non-existent, at least for now, knock on my wooden noggin.
The countryside over which I fly my missions here is largely forest, river valleys, or farmland, so there are no worries about complaints being lodged or birdshot being administered. The downside of course is that if anything goes wrong and the drone crashes en route, the chances of finding it would be about the same as those of hitting the jackpot in Vegas, so there is a leap of faith each time I hit that Litchi screen launch button.