The new area mapping feature is great. I tried it for the first time: the specified area was flown correctly – 27 images from a height of 35 m. At the end of the mission, the drone – DJI Mini 3 Pro – was supposed to fly back to the starting point. However, it flew over the starting point and continued for another 200 m before attempting to land in unknown terrain. Only when I switched to sport mode was it controllable, and when I pressed the RTH button, it returned to the starting point.
I couldn’t determine the cause of the continued flight.
I suggest that the end of the mission should be the return to the control unit, because I may have moved away from the starting position.
I edited the images I took with ICE from Microsoft as a panorama.
I will continue to use the function, but I am sure that at the end of the mission I will switch off Litchi and use the RTH function.
I am using the latest version of Litchi Pilot Beta 545.
Thanks for your feedback! It does seem quite strange that the actual flight path did not match the planned mission path. There’s also a chance that interference may have confused the drone and caused it to continue flying instead of properly ending the mission.
Could you please share your mission and the AirData link for this flight? That would help us analyze whether the issue came from the mission itself, a software bug, or external interference.
I have had a look at your flight log. There are some curious details in it.
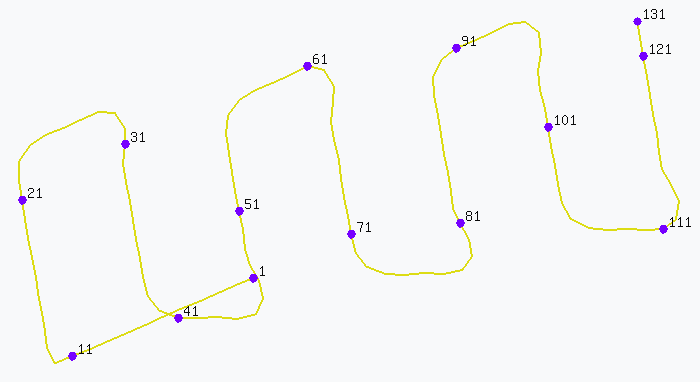
The portion of the flight that was controlled by waypoints (Joystick mode in the log file), was unremarkable. The drone executed the mission and went into return-to-home mode as soon as the mission completed. Here is a picture representing the portion of the flight in waypoint mode:
At time=2 Min 48 s (point 124 in the diagram below): The drone completes the mission and switches to “Go Home”.
At time=3 Min 18 s (point 147 in the diagram below). The drone is as 185 ft altitude and switches to “Auto Landing”. It is hard to see but point 147 is really close to your home point. So far, the drone is behaving perfectly normal.
This is where it gets interesting.
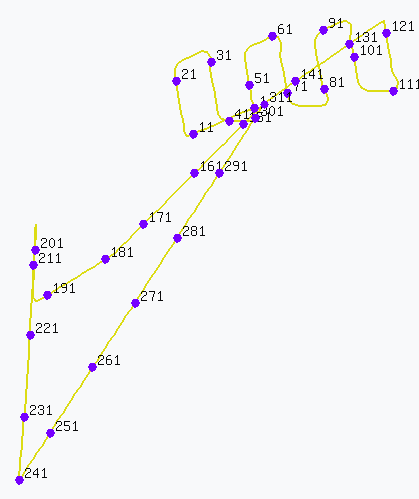
At time=4 Min 13 s the log shows the drone at an above take-off altitude of 0 (zero) but then it begins to rise and it is traveling to the southwest.
At time=5 Min 24 s after the drone has ascended back up to 40 feet, the drone is placed into “Tripod” mode for a short while with a speed of 0 (zero).
At time=5 Min 40 s (point 247 in the diagram below). The drone enters “Go Home” mode again.
At time=6 Min 35 s (point 304 in the diagram below). The drone enters “Auto Landing” mode again and lands near the home point.
The strange portion of your flight is between points 150 and 241. During this time the drone was in “Auto Landing” mode. It might appear that the drone was being blown off course. There is data in the log file that would help to confirm that but I am not experienced enough to decipher it. According to AirData, the wind was out of the north (346 degrees) at 23 km/h.
My best guess (and it is only a guess), is that your drone was being blown off course. Did it feel very windy at the time of this flight? Know that wind speeds generally increase with height.
I should also mention that if you want to replay your complete flight using Google Earth Pro, I have a utility that will convert your flight log into a virtual flight. The utility can be found here:
Thanks to everyone for their efforts to clarify the situation. But there was no real explanation.
I’ll have my finger on the mudus switch when the next mission is flown to switch off Litchi.
As for the wind conditions, all I know is that there was little wind noticeable. I don’t know if there was more at the flight altitude.
However, I don’t think wind was the cause. The drone reached the starting point, then accelerated and flew away.
the explination must have not been understood… if you unlok the mission and fiddle around with the screen you can easily add a point to the mission… i will bet you touched the screen somewhere near the edge and added a waypoint to the mission… the drone was just flying to that position… did it take pictures on the way to this point?
After these 2 automated actions, the only thing that would have caused the drone to do anything except Land and Shut Down the motors, would be Pilot input.
Mode switched or Landing canceled are the likely events, followed by joystick input to change altitude, speed and direction.
Another “Go Home” action was eventually initiated which caused the normal behavior of the drone traveling to the Home Point and landing.
To clarify, it is not possible to add a waypoint with Litchi Pilot because the app has no native flight planner and missions need to be edited in the Hub. In addition, area mapping does not allow waypoints to be added so this cannot be a planning error.
yeah my first mission was crazy too… but i think it was operator error
on my first flight i initiated return to home from the controller with no problems… I am not sure how it will act if i have to return to home to replace a battery… I will say i was able to pause and cancel the mission easy with the play and pause buttons and the effect was quick… i have already crashed into a 80 foot tall pine tree hand flying so i hate trees… lol
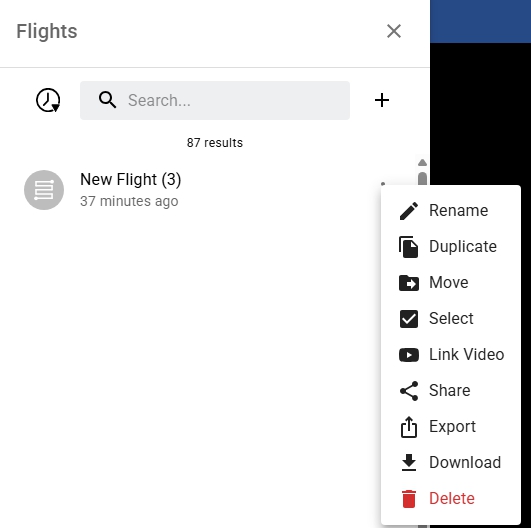
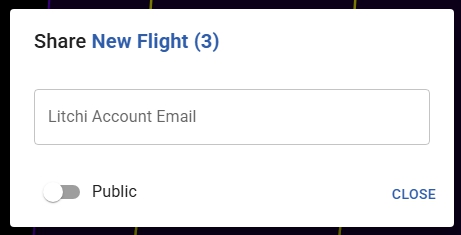
I think the flight schedule is public. I clicked on the 3 dots and activated public. Then I clicked on close.
Do I have to enter something in the “Litchi account email” field?
What should be in the “shared” section? If the flights I shared are supposed to be there, I don’t know what to do next. Help is needet.
Thanks, your mission link wasn’t correct, i fixed it.
I see your final action is currently set to “Hold and wait for further action.” Maybe you change it after your flight.
“Return to Starting Point” should works well but if it happens again, it would be very helpful to get as much feedback and detail as possible (flight conditions, messages displayed, circumstances, etc.) so we can better understand the situation and follow up.
I have done some further analysis of your flight. Here is another snapshot from Google Earth where the flight path is colored according to the flight mode:
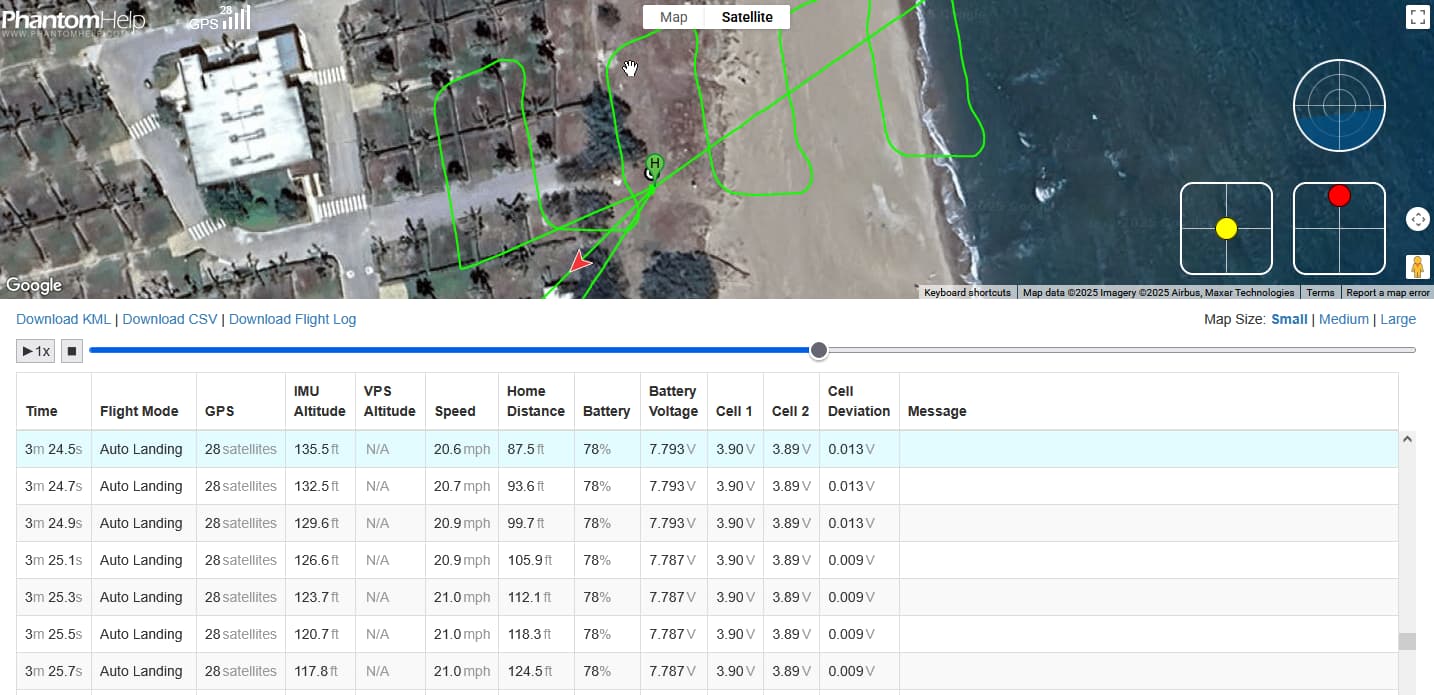
I then looked at the “Auto Landing” (red) portion of your flight log using the Phantom Help log viewer. The logs clearly show that you were using the controller sticks during the auto-landing sequence. Here is a snapshot showing you applying right stick forward during auto-landing causing the drone to fly to the southwest:
From what I can tell from the logs, your drone behaved exactly as expected based on the flight modes and your stick inputs. I can see your stick inputs that you used to counteract the auto-landing sequence. For unknown reasons, you flew further to the southwest during the auto-landing sequence. It is as if you got confused and pushed the right stick up instead of the left stick up to counteract the landing causing the drone to continue flying further away to the southwest.