I thought I had done that. I imported it into the utility and had it generate a file but I must have been doing it wrong. I figured it was me and not the utility. I hope I didn’t frustrate Wes too much. He was trying to help me yesterday but every time I thought I had it worked out I had another issue.
Thank you again. I’ll let you know how it goes tomorrow.
So the wind finally died down enough that I could fly the mission. It’s taking 22 pictures like it’s supposed to BUT it is not completing all of them at the waypoints. As It transitions to the next waypoint it is still completing the task. The only waypoint that it did it as it was supposed to was the 9th (last). Maybe it needs a “Stay For” command but I’m not sure where to put it.
What drone and what software? Is this the M3E using Pilot 2 or the M2P using Litchi?
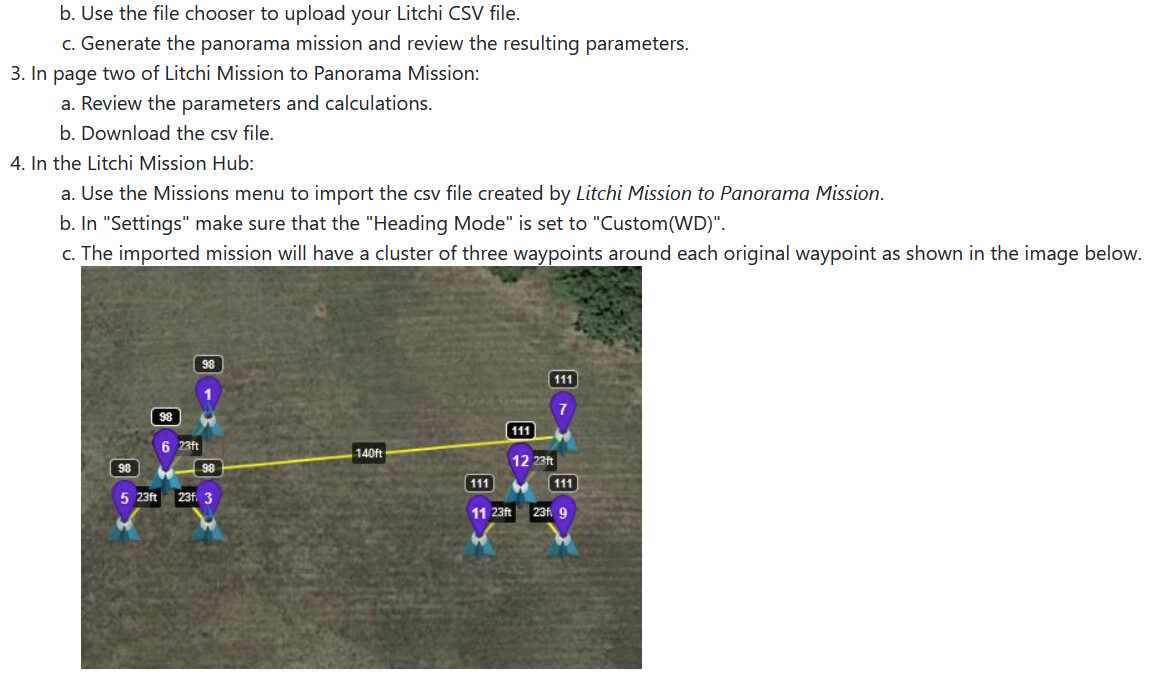
Are you saying that the last (9th) waypoint is the only one where it took the 22 photos or was the last (9th) waypoint the only one where it continued to take photos after leaving the waypoint?
It is taking 22 photos for every waypoint, however, not all 22 pictures are being taken at the waypoint. Some of the pictures are being taken as it is continuing to the next waypoint. The only one that it took all 22 at was the 9th waypoint as it was the last one. It would be easier to show you but I didn’t do screen recording as it was happening.
This may be unique to the M3E. I have made a change that should only affect conversions to the M3E waypoints. Please use my utility again to convert a panorama mission to a KMZ file and then try flying that panorama mission with your M3E.
Hi. I tried capturing a 360 panorama with my mini 3 pro, but for some reason the gimbal pitch is not changing (stays 0° for the entire mission). Otherwise, the heading change and image capturing seems to work.
Thanks. I just tested both and they are both setting the gimbal pitch angle. Would you contact me through my web site so that you can share the mission with me? Or, you can share the mission here.
BTW, if anyone is looking for the best program to make 360 panoramas from the photos, PTGui is by far the best. It won’t choke on a lot of very large photos, like Photoshop and other programs will. It uses your GPU if you have a good one, its auto alignment is the best.
Well worth the money if you want the best 360 panoramas. It’s too windy to try out this great tool right now, but I set up a 180 degree mission by hand using mission hub and the output was amazing with PTGui.
Feedback and Questions on the New Litchi Mission to Panorama Mission and Legacy as well.
I’ve been using DJI Go (only) to take spherical panos and have a good amount of experience with creating panos from different camera types. I’m using a Mavic 2 Zoom right now for testing. My concern is the file count output of the Litchi Panorama mission and especially the New one.
With DJI Go, it outputs 25 photos every time. The photos are 24mm focal length (35mm focal length equaivalent) when these 25 photos are generated. The resulting PTGUI image is about ~17,000x8,500 pixels.
There’s 8 photos at +15degrees pitch
There’s 8 photos at -18degrees pitch
There’s 8 photos at -55 degress pitch
There’s 1 photo at -90 degress pitch
Here’s the table out of PTGUI – https://i.imgur.com/iIUDolN.png
With Legacy Panorama Mission, the photo count is fewer, only 22 photos
Default settings are the following:
There’s 8 photos at +20degrees pitch — 6 degrees higher than DJI go
There’s 8 photos at -17degrees pitch — 3 degrees lower than DJI go
There’s 5 photos at -54 degress pitch ---- 2 degrees higher than DJI go, 3 fewer photos than DJI go
There’s 1 photo at -90 degress pitch — same as DJI go
With New Litchi Mission to Panorama Mission –
Pitch angles are fixed to the following angles when set to 24mm zoom and set using the default overlap (30 degrees vertical, 30 degrees horizontal requested) gives the same number of photos as DJI Go, 25 total photos.
8 Photos at +20 degrees — 6 degrees higher pitch than DJI Go
8 Photos at -16.7 degrees — 2 degrees lower pitch than DJI Go
8 Photos at -53.3 degrees — 4 degrees lower pitch than DJI Go
1 Photo at -90 Degrees — same as DJI Go
Questions:
For Legacy -
what focal length is being used by the camera with Mavic 2 Zoom? Would I still be shooting at 24mm?
Is the pano count sufficient to construct a sphere closer to the nadir (since it’s 3 fewer than DJI Go and defaults are at different pitches than what the DJI Go pushes out)? I suppose I could just give the defaults a try and also use the pitch angles from DJI Go and give that a try and see what I get.
Questions for For New:
Is photo count sufficient to construct a sphere? I guess I could just try it and report back.
Feedback for New:
For the New Panorama Mission - I’d probably only use this if the legacy didn’t cut it for me and as I don’t appreciate the benefit of DJI fly compatibility yet. In that case I’d like to get a little more control on the pitch and photo count at each pitch so as to take a more optimial number of photos.
I’d like to try the New with higher zoom and more photos and see if it’s worth the extra collection time for the higher quality panorama. Until diving into the metadata today I wasn’t aware what zoom was being used to take the photos in DJI Go.
We’ve been using PTGui for almost a decade exclusively for 360 spherical panorama creation from different camera types, it’s an industry standard, not too expensive, reliable and somewhat easy to get started with depending on the type of cameras you’re using. With drone images that are well conditioned for spherical panoramas it’s as easy as drag and dropping the photos into PTGui, hitting Align, hitting Create Panorama, I’ll have a jpg in about 15 seconds. It seems to work without fail with sets of 25x photos I get from DJI Go pherical panorama mode with the Mavic Zoom we’ve been using.
When using the legacy 360 pano creator, there is no assumption of focal length or FOV. It simply captures 8 photos in 45 degree increments in the top two rows and then 5 photos in the bottom row. This is the default behavior in Litchi’s 360 pano mode. I simply used the same parameters. You can get by with only 5 photos on the bottom row because, when the camera is pointed down, there is already more overlap than in the upper rows and 5 photos will capture everything you need for the pano.
Yes. The photo count is determined by the camera specifications and the parameters you specify. Of course, if you specify an overlap of only 5%, you may have trouble stitching. I would guess that somewhere around 30% would be the minimum.
While the gimbal pitch values may be different from what DJI Go uses, the differences are irrelevant. The gimbal pitches used in my application are calculated from the vertical FOV of the camera in conjunction with the requested vertical overlap. My appliction creates a diagram showing what the resulting gimbal pitches are and how they overlap with the gimbal pitches of the other rows.
Another thing I should point out is that the overlap specified in my application is percentage, not degrees. The default overlap is 33% of whatever the horizontal and vertical FOV of the camera.
Thanks. I’ve setup two different test missions (legacy test and new test). I’ll report back once I run it and generate the panos, especially if I have issues. Not worried though, seems like it will work fine. I will be nice to run missions for generating panos for consistency and automation. Software is easy to use once I understood general flow in Litchi.
{kind=link}