Until today I was of the impression that WP1 is the reference for the altitude, as according to the mission hub WP1 is taken as the reference for the altitude measurements of the other waypoints. Today I almost crashed by drone into a tree because the reference altitude is not WP1 but the Homepoint! Fortunately my drone was forward facing and stopped due to the obstacle. In my case the homepoint was about 30m below WP1 and thus I only had about 10m height at the point where there were some trees.
I don’t think this has been communicated anywhere that WP1 should be level with the homepoint, in fact the mission hub gives WP1 as the reference.
In my case I must say that I cannot always see on the map if WP1 is a proper place to start and land the drone, thus sometimes WP1 and homepoint differ. Especially if you are running missions in the mountains. Using the above ground checkbox would not change anything as there also WP1 is the reference.
I would appreciate some clarification on this.
By your assumption if WP1 would be the reference and WP1 is set to 10m altitude then at all other waypoints the drone would be flying 10m higher then the altitude set to them…
The definition of altitude in the manual is a bit blurry and does not really say that WP1 and the take off point must be level for the altitudes shown on the markers to be correct. I trusted the altitudes shown in the markers. These altitudes are wrong if WP1 and take off point are not level. IMHO this should explicitly be mentioned in that help manual. I am astonisched that nobody has run into this yet.
Alternative method =
Set waypoint 1 way out from any obstacles.
Fly drone to somewhere close to waypoint 1 manually using dji.
Start Litchi
Set start mission from waypoint 1
Drone will fly to waypoint 1 itself and then continue the mission.
Did I understand this right? Are you seriously meaning me to create a new homepoint at WP1 away from the actual homepoint by flying and landing the drone to terrain that is too steep or otherwise inadequate to land and take off. The reason I did not go to WP1 to take off my drone was exactly due to the fact that WP1 turned out to be too steep for take off and landing.
Ok, guess I will have to live with that when planning a mission. Thanks for the references. In any case it would be nice if WP1 could be moved to the current homepoint through a menu command when at the mission site, or even better to create a WP0 at the take off coordinates.
You obviously do not understand how litchi works.
The homepoint is the place where the drone takes off.
It is a fixed entity, on the moment of take off, determined by where the drone takes off from.
Waypoint 1 can be anywhere else at whatever height, depending where you put it.
I would not risk flying around an alpine area until you have learned
how to use Litchi correctly.
Until today I did not know that wp1 and take off point must be level for the altitudes defined in mission hub to be correct. Take off and wp1 can be at different locations as long as their actual altitude does not differ substantially. If they differ then it becomes complicated and you have to manually adjust your mission altitudes.
Only half correct. The mission hub is very well aware of altitudes above sea level. You can set the checkmark ‘above ground’. The app itself is not as you cannot apply the ground elevation option, it will only take the calculated value from mission hub, if you have checked that option in mission hub.
Okay. I think we have discussed this to death now.
I have learned that there is no solution and that I have to take into account if there is a difference of altitude above sea level for take off point and wp1.
That’s all.
Thanks for your input!
I see that this has been “discussed to death”, but I thought I could add something that may help you understand why Litchi has to assume that WP1 is at roughly the same altitude as the home point.
Forget about Litchi for a moment and only consider the drone. Drones determine their height by comparing the barometric pressure at their current location against the barometric pressure at the home point. Even though you can see the drone’s path overlayed on a map (potentially with elevation data) in either the app or the mission hub, the drone will only ever know its height relative from where it took off (barometric pressure difference).
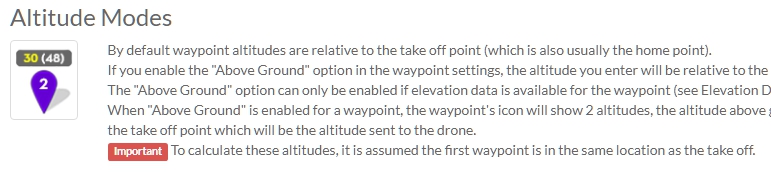
This is why, when the “above ground” checkbox is checked, an assumption has to be made that the the first waypoint is at roughly the same height as the take-off location. It would be nice if we could specify absolute elevations but the drone will only “know” its relative height above (or below) take-off.