Since I’m a little on a timer here - I’m hoping to set up a last-minute “circle a house while it’s being built” job with a mini 2 drone and litchi. I don’t even have the drone in hand… grmblamazon and was/am hoping to do my first flight today since build starts today! Oops terrible planning. Anyway…
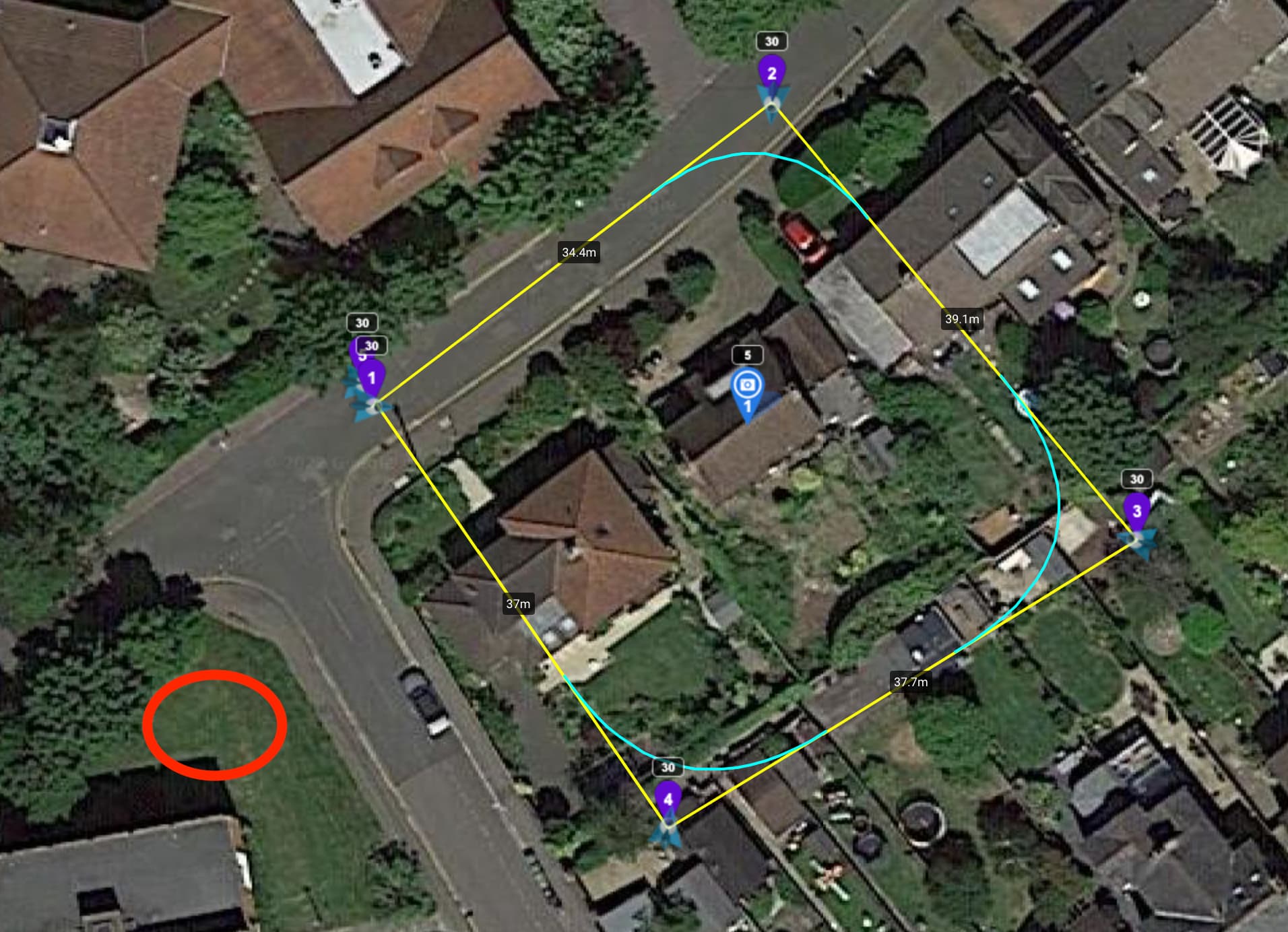
So - I’ve created a path that seemed reasonable. One central waypoint and a circle around it.
And I’m planning to run the flight as often as needed but at least once a week.
My questions:
0/ Is this path reasonable? The house house is 10x10x8m so I put the only POI at 5m in the center of the plot and used the default path height at 30m. Should I circle wider? Higher? (would have to ask more neighbours)…
1/ Where is the take off point? Can I be anywhere and the drone will just fly a straight up, then straight line to waypoint 1? Or maybe it’s expecting waypoint 1 to be where I stand (marked in the image)
2/ What happens after the final waypoint is touched? Will the drone fly back to where it took off from and land there? Or just hover waiting me to tell it something? Basically how can I get it home safely being a total novice flyer!
3/ How does range work? Does litchi program the drone, fire and forget? Or is this still radio based? I know there’s also legal limits to how far the drone can go from starting point, will investigate but I’m assuming line of sight for now.
Any other tips to make this cooler? I am debating doing some type of approach and leaving shot before and after. I probably need to be careful with not scaring people (not fly too low over streets) etc etc.
0/ Is this path reasonable?
Yes, or use the orbit mode.
1/ Where is the take off point?
Red circel is fine.
2/ What happens after the final waypoint is touched?
Depends on your mission settings & RTH behaviour as described in the drone’s user manual.
3/ How does range work?
The mini 2 is a so called VSC-drone and needs a constant & good connection with the remote conroller to run waypoint missions succesfully:
4/ Any other tips?
Read at least the Waypoint and/or Orbit section of the online user guide: https://flylitchi.com/help#waypoints-p3
Read at least the RTH-section of your drone’s user manual:
Without going into a lengthy response to your questions, you can select the option of downloading a VLM file and then fly the mission virtually on Google Earth. This will show you the views from the drone as well as indicate, in general, whether you have sufficient clearance of trees and other potential collision points.
To do so, select the VLM option in the Mission menu at the bottom of your flight you have planned. You will see a download take place at the bottom of your screen. Open the download. You will see the flight depicted in the dropdown on the left of the screen in Google Earth. Double click it and then select fly virtual mission. You will find that, because it is not an exact circle, at times the drone will be closer to the POI than at others. This is typically during the straight lines of flight. You can make adjustments once you have seen the virtual mission.
Hope this helps.
Very useful stuff Robert and Yordie. A few small extra questions:
1/ So if my take off point is not where waypoint 1 is, am I safe to assume litchi will fly straight up, then straight to waypoint 1? Or will it fly a straight line, potentially hitting trees while gaining altitude? Same for last waypoint?
2/ Am I understanding correctly that with ‘above ground’ switched on for every waypoint, the altitude choices all are relative to this point? My local area is slightly sloped so if I venture out a bit more I might have to be very careful if I brazenly set path height at 30 - might hit a tall tree if it’s standing on some higher section of the area…
Will certainly try the VLM and read the stuff provided, thanks already!
Yes and No:
Before you hit start the app gives you the oppertunity to start the mission at any waypoint, not just waypoint 1. The drone will then ascent to the altitude of the starting waypoint, then it wil fly in a straight line to this waypoint.
Read the chapter ‘Altitude Modes’ in the ‘Mission Hub’ section of the online user guide:
If starting the mission while your drone is on the ground, your drone will fly straight up to the height of waypoint 1 and then fly horizontally to the coordinates of waypoint 1. Many flyers will take off manually and fly to a location near waypoint 1 then begin their mission. This allows you to avoid any obstacles that may be in the area.
Not exactly (if I understand what you are saying). Since you are flying in a sloped area, it is very important for you to understand the following:
All specified heights are relative to your take-off location. You could fly the same mission twice, once taking off from ground level and once taking off from a location 5 meters higher. The drone’s altitude will be 5 meters higher for all waypoints on your second mission.
If you check the “Above Ground” option, the height you specify will be the “above ground” height at each waypoint. HOWEVER, this will only be accurate if your take-off location is close (in height) to your waypoint 1 location.
Since it sounds like this is all new to you, I would strongly recommend that you test this in an open area first. If anything were to go wrong or if there were any miscalculations on your part, it would much safer for that to happen in an open area.
If I were flying this, as @Yordie mentioned above, I would create a true spiral/circular mission using either VLM or the Spiral Mission Maker for Litchi.
Thank you Yordie and wesbarris.
I think I get it now.
Assume a 100m mountain in the middle of a sea-level (0m) desert
“above ground on” (and assuming elevation data is available in the desert ) = if waypoint 1 is 30m on top of mountain, the real height above sealevel would be 130m. If I then fly to waypoint 2 somewhere in the desert, still 30 above ground mode, I would drop to 30m.
“above ground off” = if waypoint 1 is 30m. middle of mountain, the drone would go up 30m from launch point, and then if waypoint 2 is above sea, the drone would just stick to the same place, 30m above launch point.
So next question is how accurate is elevation data but I think I’ll just play it super safe first, and ha, I also got my DJI insurance going
Thanks both, and yes lots of cool stuff to try out. For example what the drone does if waypoint 1 is at 30 and 2 is at 60, will the drone go straight up, or more elegantly curve upward while flying towards 2… I can find this out manually
for your mission, you can manually take off and record all points from the best angle when the camera is pointing at your house, and then save this mission to your phone. And then edit as you need it.
Thx paxxa, yes I understand it doesn’t really know sealevel but for my example (where I said assume desert at sea level) I was just reasoning through it.
OK that was my final mission for the day… and my final one failed.
Basically for some unknown reason, my flight to a 550m way, 100high spot worked perfectly with 4/5 bars remaining, going to 730m away, 100 high from there dropped reception to zero bars!
Thankfully for some reason the bars came back long enough for me to issue return home which it did fairly quickly and with plenty of battery, and I’m pretty sure it would also do an auto-return-home if the battery would run out completely…
Does anyone have a good description of what litchi+drone do in such situations? This was a night mission so looking back at the footage was a bit hard to make out but I had the impression that litchi just stopped and waited for a connection, rather than that it used some type of logic like "hmm, it’s now 10 minutes in but the drone is at the spot for 5min, if that… maybe start doing something clever…
Not sure what I am expecting in an out-of-range situation with litchi, I know it’s just trying to send ongoing angle/distance/power commands rather than “now fly to xyz position and tell me if you’re there” but even then I’m not quite sure what to expect.
Let me dig around the forum to see if anyone wrote this out, any links appreciated.
“Failsafe RTH” is a function of the drone regardless of which app is used to fly the drone. After a signal loss of 6 seconds the drone will initiate its “Failsafe RTH” procedure as described in the DJI manual.
Thx wesbarris, I was aware, but somehow I don’t think it worked properly.
Basically a 5 minute mission started losing connection (to 0 bars) about 2 minutes in, and then returned maybe 8 minutes in after I also started to manually trigger return to home in litchi only to land at home about at the 10min mark.
I’m not certain what exactly happened, perhaps it never had 6 continuous seconds of no connection, maybe it was returning RTH but then litchi took over when it came back into proper range and sent it back away… something…
I wasn’t super concerned the drone would completely not return since it also has a battery-based failsafe but it still was weird.
I think if that were my place I would do a second run without the curves and take a photo at each waypoint. If you have a dispute of any kind during building work a photo may be more useful than a video?
Yep, I am doing that as well =)
Was (am, really) struggling a bit with photo taking though. Auto record option seems to badly interfere with taking photos since you can’t take photos while recording (at least, not RAW mode). Logically I set an action ‘turn off recording’ but it just turns it back on. Not really auto, more just ‘brute force on!’ but OK?
Also, many of my shots look rotated, pictures being taken while still in motion are of course bad, but even building in 2s seems to sometimes fail.
Eh, it’s all a little shaky but overall I’m enjoying it.
Running your own streaming video server (nginx docker) is useful. Now everybody can play along
I ordered a VR headset (for the phone)… might be fun, will report back
Had one weird freakout in waypoint mode where the drone just got stuck in one particular place - very annoyingly it was: perfect reception and plenty of gps, but still for some reason the drone went to the location of one waypoint and instead of hovering at 2m for the indicated 2 seconds, it hovered at 0.1m or something (I could see the grass moving!) indefinitely. I had to stop the program and restart to get it to move
Gimbal camera can overheat, especially inside. Don’t use the drone unless you’re actually flying
Battery care is non-trivial, you shouldn’t leave your batteries at 100% charge and inside the charging case - instead when left out the batteries will intentionally discharge to a comfortable level (for longer-term storage)
The biggest thing I don’t yet understand is how range works. Which things hurt your range, how much, and why (sometimes) the reception bars jump from “fine” (3bar) to “oh no” (0 bars) and back and forth.
Hi. When I do the 2nd run without the curves I make sure that the 1st run has completed and RTH has been completed and the drone shut down. I then restart it and load up the 2nd litchi run for photos. At each waypoint I set up “actions” which allow me to “stop” for 5 secs and “take photo”.
This has always been successful image wise and even allows me to take photos manually between waypoints.
 ) = if waypoint 1 is 30m on top of mountain, the real height above sealevel would be 130m. If I then fly to waypoint 2 somewhere in the desert, still 30 above ground mode, I would drop to 30m.
) = if waypoint 1 is 30m on top of mountain, the real height above sealevel would be 130m. If I then fly to waypoint 2 somewhere in the desert, still 30 above ground mode, I would drop to 30m. but I think I’ll just play it super safe first, and ha, I also got my DJI insurance going
but I think I’ll just play it super safe first, and ha, I also got my DJI insurance going