I tested waypoints and as expected, other than the strange method of having 2 screens to go through, the initial screen for planning then going back to the screen that launches the mission all worked fine except for when i choose reverse as finishing option nothing happens
Also follow mode, im probably doing this wrong so please let me know as there isnt much in the way of instructions i can find, either way the quad had a mind of its own.
I also tested Dynamic home point with my Nokia 42 phone and it worked flawlessly as expected, so glad you added this option as DJI wont add it to the Fly Crapp oops App
Also what are the red numbers that appear, i can guess the lower number is downward height but why is the top numbers appearing
Lastly is there any flight logs being created, ive looked in
Internal shared storage\Android\data\com.aryuthere.visionplus\files\DJI\com.aryuthere.visionplus\FlightRecord
Oh and also in waypoint mode how do i add “start record” as an action, there is no option, all i can see is autopano option which adds the relevant settings, as a workround i just delete all the options and set the first to Record
You’ve probably discovered this already but FYI that’s the wrong path to Pilot’s folder. You’re looking into Litchi’s…
Try
storage\Android\data\com.flylitchi.litchipilot.dji\files\LOG\
No thats the wrong location, thats just got 15 folders with various names, I think i have found it here
Internal shared storage\Android\data\com.flylitchi.litchipilot.dji\files\DJI\FlightRecord
Only issue i can see is the battery reporting level is incorrect in the logs, a CSV of the flight shows cell voltage but not battery percentage
Reverse finish action: it will soon be renamed to ‘Hold’ to reflect its meaning better. It means the drone holds position at the end of the flight, allowing you to reverse manually along the path using the joystick.
Follow issues: it looks like the main issues here is:
your mobile device has no pressure sensor leading to unstable mobile device altimeter (as it relies on GPS altitude)
and 2) overall your mobile device GPS accuracy is not the best at 4+m so I would suggest moving the drone a bit further away from you (remember GPS Follow is better suited for long range following due to GPS accuracy). However it does behave strangely overall, unsure why but to me it looks like the mobile GPS is not where you actually are (check the map to see if the mobile device icon matches your real location)
Downward is distance to nearest obstacle below the drone, the red number at the top is distance to nearest obstacle in all other directions.
You can add a start record action in the hub just like before by adding an action and changing the action to start record. Could you show us a screenshot of where you don’t see the option? Maybe a UI bug
So for reverse you can hold the joystick backwards and it would just follow the WP’s back to the home point?? I must have a play with that later
I did not know phones could have a pressure sensor, you learn something new everyday
yep I have had a good play with follow, the results are shown in the video
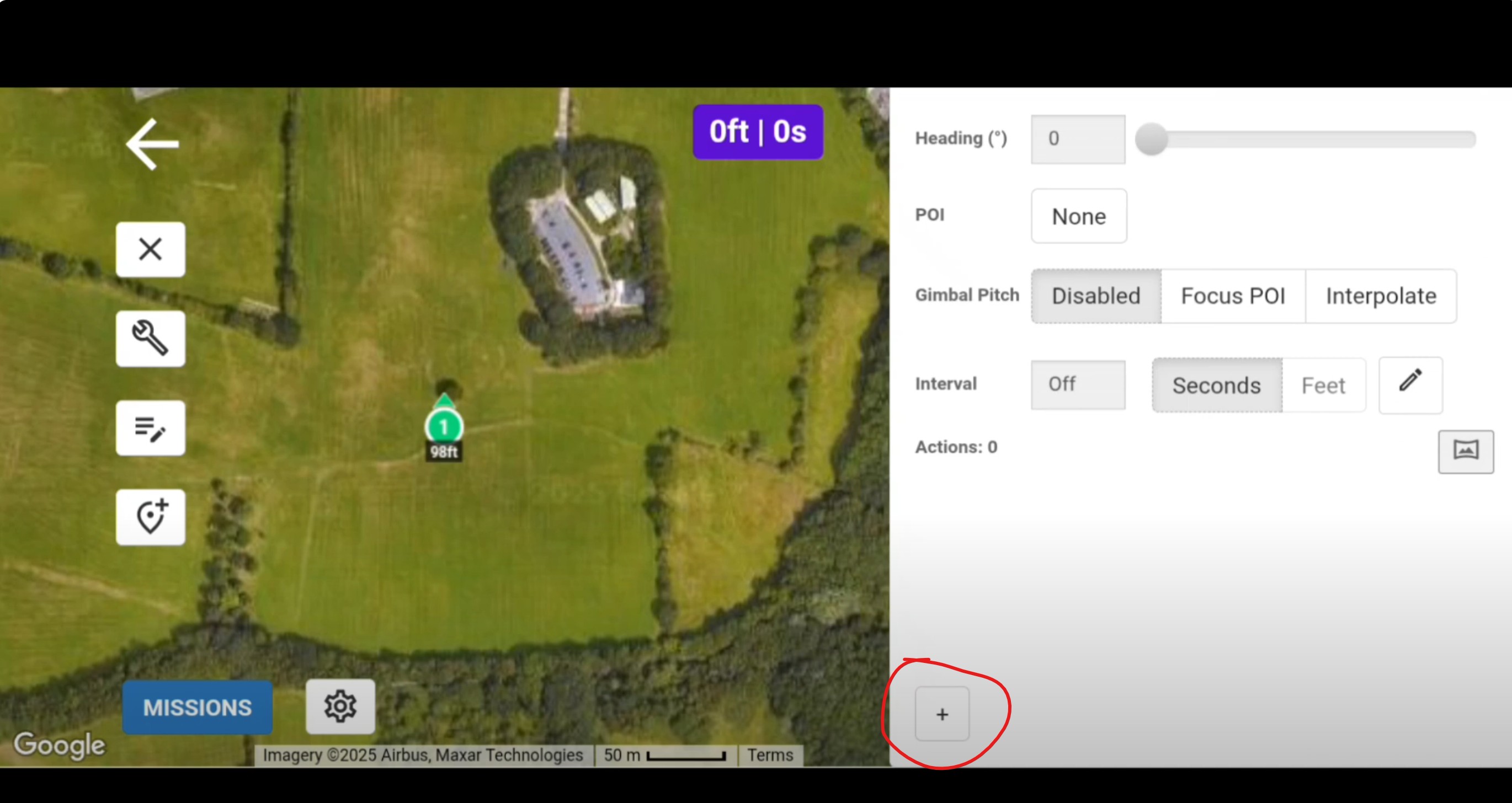
Also in the video i show the adding of a WP and my inability to find out where i choose an Action, also a screen shot of the webpage hub with the same thing.
Oh and didnt you used to be able to choose the heading of the drone, in essence have it point in a direction as it moved from WP to WP ? i see that is now greyed out
is it possible to include the ability to set the HP to controller or quad such as the DJI fly app has?
Also in regards to the data about the battery level, it seems that Airdata is the cause of that, i do get a battery percentage when i use the phantomlogviewer program to get a CSV file
Click on the + to add an action.
For the heading, in order to change it you need to set the Heading mode to ‘Custom’ in the mission settings
Your Follow video shows gimbal tilting up/down quite a lot due to the mobile device altimeter being quite unstable, again this is due to it not having an air pressure sensor. Lower to mid tier android devices don’t have these unfortunately.
Regarding the homepoint, we will make it possible to drag it on the map, like in the previous app, which should fit your needs?
The mobile device accuracy is not great (between 4-6m), ideally you want 2-3m. Move the drone further away to get better results with reduced mobile GPS accuracy.
Also the Adaptive heading mode is better suited for following higher speed movements (running/cycling/car etc.). For walking it’s better to use Locked heading mode (change it using the top button on the left side of the screen).
We’ll add record on take off in a future build, but we don’t have any plans to add video tracking at this time.
@vico
Can you explain the difference between adaptive and locked heading mode. I couldn’t exactly figure out what happens when I use the one or the other.
Furthermore: the app says “frame the object”, but framing shows no effect. So how do you choose the object you want to be followed?
I don’t know in which mode I was (adaptive or locked) but sometimes it happened when I started the follow mode that the drone began to fly a half circle or so around me before it started to follow (which ended one time nearly in a tree because it was so sudden ).
Apart from these behaviours and settings which I don’t understand, the follow mode worked really fine (only tried it walking up to now in different distances), very focused on the object (I finally chose it by just clicking on it, it that right?) and very reliable.
See my previous posts on the subject of follow mode, Vico explains it all,
@vico maybe a bug but pushing the button H button you an RTH option and pressing that just makes the controller beep and then nothing, are you supposed to press and hold it? also I cant work out how to drag the HP all that happens is the map moves
@J_Slater not specifically. @vico writes that adaptive mode is better for faster movements and locked mode better for walking, but not what is exactly the difference between those modes.
Also I couldn’t find anything about choosing an object to follow (no frame appears) and nothing about this random circular motion at the beginning of a following action (the drone seems to position itself somewhere but where, how and why). I’m using a Samsung Galaxy S24 which seems to have a pretty good barometric sensor so I have no problems with accuracy and focussing the object, I just don’t understand the drone’s behaviour and which app setting effects which drone maneuver.
Locked is the same as the old North mode and Adaptive is the same as the old Course mode, they have just been renamed, see old user guide for more info Help - Litchi
When you start follow, place the drone in the position you want it to follow from (front/side/back etc) and frame the subject (i.e. make sure you are in the center of the video frame). For Adaptive mode you should also face the intended travel direction before starting (it uses your mobile device compass).
Locked essentially means the drone always tries to keep the same heading. Adaptive means it keeps the same heading relative to the direction you travel in (best suited for running or faster movements).
You are confusing Follow with Tracking.
Follow uses the GPS coördinates of the mobile device, it’s NOT based on optical Tracking.
In Follow Mode you Frame the object (mobile device) by adjusting the Gimbal Pitch and drone Yaw.
RTH bug, if i take off and then fly away 100ft and then initiate RTH it will fly home, but if i land the quad and then take off again the RTH button just beeps once and nothing happens screen recording attached ( not sure why it popped up confirm landing)
Only way out of this is to reboot everything (quad. controller, app)