After nearly 5 years of almost every week, very enjoyable and reliable flights with my old MP1, I had a flyaway!
Yesterday around lunchtime, I saw smoke in the distance somewhere South of my home, so I thought to see the extent of the danger, to put the Mavic Pro up to 40 meters from the back yard of my house in a Coastal City in South Australia to see if I would be any danger from the fire. Yes I did wait for the solid GPS and “Home point enabled voice” as usual before that first ascent to 40 meters.
The drone suddenly took off in an Easterly direction and kept going without any input from the controls. I then sent the return to home command with the button, but although the sign came up on the screen - “going home” it just kept going - It would not respond to any inputs at all. I watched the screen and set the recording action until the “video lost connection” appeared. With no further signals I just closed the controller. With no Wifi connection enabled, I was not getting any response from the “find my drone” button I had to sadly realize that I may never find the drone again.
On a whim I activated the wifi on my control tablet and miraculously the app showed me the spot where it could have landed. This was some time well after the last sighting though and I was not very hopeful of finding the Mavic. So I went to the indicated landing spot and had a really good search around the area, to no avail though. I am telling this story so others can be aware that this can also happen to them.
I now know that it was a mistake not recording the flight to my tablet, as this extra information may have been handy up to the point of signal loss. That is one thing I would always do from now on if I ever get the drone back or another one at some time in the future.
Anyway at this stage I am hoping someone will see my phone number under the battery and call with hopefully good news.
The whole thing is a complete mystery and I would really appreciate any feedback or suggestions from any of you who have had this experience and any help would be much valued…
Cheers,
mereflyer
That flyaway is utterly bizarre. I have heard of law enforcement hacking into drones to take control of them but that could not be the case in a remote area of the Australian outback.
This is pure speculation on my part, but I wonder if a long overdue compass and IMU calibration would result in a drone losing its bearings and heading off the wrong way.
Sorry for your loss. I feel your pain. Are 100% sure you were in GPS mode? Once in a while I will realize I am not in GPS mode and I need to correct the problem or the A/C will just go with the prevailing breeze unless you actively fly it against the the wind. In high winds say 30 KMH or better it might be a challenge. Also, at time the winds at even 30M can be quite a bit stronger than on the ground.
From what type of surface was the drone launched? Was there any metal nearby? Did you happen to check the direction the drone icon was pointing on the map and compare that to the actual drone? The flight logs will most likely show the cause.
A video of the incident will confirm that something occurred. However, the flight logs in your flying device will explain why the incident occurred.
As Yordie said, upload your flight logs to the PhantomHelp log viewer. Post them to the Mavic Pilots forum. They’ll provide details on why exactly this occurred. They may also be able to extrapolate where your drone landed.
go to mavicpilots.com and you ill find the information needed to upload the data files to them. You’ll have to explain to them what happened. It sounds like you launched from a surface where metal interfered with your Mavic’s compass. When ever you hear, 'The Home Point ha been set, PLEASE CHECK IT ON THE MAP"… At that point every pilot should be looking at the Map on their screen to make sure the drone and locations are correct. Even small amount of metal under concrete can cause the interference. If your drone is facing North Main St. and your screen shows it’s facing East Main St., simply turn the drone off, move it over a few feet and try again. Fingers crossed you ger your Mavic back in one piece. Those experts at mavicpilots.com are very good with the analysis.
The original poster wanted to find out why his drone appeared to fly off un-commanded. He needs to look at the flight log to find out why. That log is on his flying device, not on the drone. The log on the drone contains operational data. On newer drones this log is encrypted and is of no use to pilots.
You would do well to study some of the crash reports posted here:
I’m curious, do you calibrate your compass before each flight? I read at drone deploy that this is the biggest cause of flyaways, not sure how true that it but they see a lot of flights. Just wondering. So sorry to hear of the loss. These things are expensive and I hate hearing anyone loses one glad no one was injured. Best to you, Cleve
Sorry for the delay, Have been busy with life in general, many events make up our days and some times there are insufficient hours in the days to attend to all…
I have been able to retrieve at least the first half of the flight. In the confusion I turned off the receiver and Tablet after 8 minutes of flight. Not realizing that by doing so I lost the actual touchdown point, so if you have any ideas of how to predict where the drone would have most likely have landed, please feel free to give your best opinions Maybe we can all learn something of value from this experience…
Hi Cleve,
No I have not calibrated my MP1 for at least 12 months, so yes this is definitely a possible cause of the flyaway.
Others more knowledgeable than I, have stated that its not necessary if all going well (If its not broken, don’t fix it…) Except when flying from a new far distant remote launch site, or if any major changes or updates are made to the software.
On this occasion there was no indication of any problem with compass or IMU.
So yes I may have been wise to calibrate more often - You experts can weigh in here…
I procrastinated about IMU and compass calibration with my M1P and my MPP but was initially unaware that failure to calibrate those two features was the cause of both drones displaying a bizarre stop-and-go hesitancy while flying Litchi missions.
On THREE separate occasions when the drones were late showing up after long missions, I scampered up a 40-foot water tank tower to restore a signal connection and then discovered to my dismay that the drones were either hovering stationary far from home or were lurching to a stop every twenty feet or so. By switching to sport mode, I barely got the drones home, and it was only after I finally performed those VITAL calibrations that the stop-and-go anomaly ceased.
On three separate occasions, while reviewing video footage after long Litchi missions beyond signal reach, I was stunned to see the drone skim barely inches above treetops because I had set the altitude a tad too low, OR had neglected to designate the Litchi mission altitudes at each waypoint to be “Above Ground”, with the result that altitudes were computed above the home point elevation.
But for sheer inexplicable luck, I can count at least FIVE instances when my drones COULD have vanished never to return home without my having the foggiest idea why the drone went AWOL, and without my gleaning any insights that would prevent a recurrence of such losses.
Thanks to those multiple close shaves recorded on video, I am now meticulous about the calibration of the IMU and compass on all my drones, while I also cross-check my altitude settings with obsessive attention to detail while creating new Litchi flight plans on the Mission Hub.
I have had a look at your flight log. I am not an expert in analyzing logs. You should post your log information as Yordie described in post #2. There are some really talented experts there who will be able to tell you more than I can.
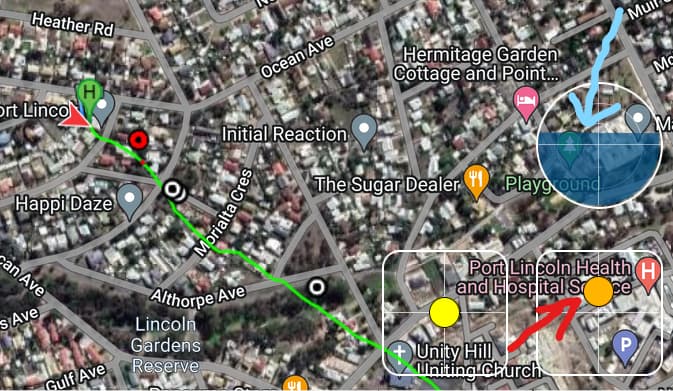
Here is what I can see from your log:
Your drone was pointed ESE before take-off. This is important: Does this direction match what you remember? It looks like you took-off from concrete.
Your home point was updated at 5.8 seconds into the flight when you were about one foot off of the ground. It is best if you wait for GPS lock while still on the ground. However, this did not cause a problem with your flight.
At 29 seconds, 56 feet high and 290 feet away, you received a “GPS Position Mismatch” error. This again makes me question the direction your drone was pointing upon take-off. Was it ESE?
At 34.3 seconds you initiated the RTH function. The drone was 106 feet high and 460 feet away. The drone was traveling away from you at 20 MPH. The drone slowed to around 6 MPH but was still traveling away from you going backward. Was it windy that day?
The log ends at 8 minutes. The drone was 225 feet high and 7,500 feet away still traveling away from you at around 10 MPH. You still had 50% battery left.
It is not necessary to calibrate your compass after any period of time or moving any distance. This type of compass calibration is solely to eliminate any magnetic effect from any ferrous metal on the drone. For example, if you attach or remove a ferrous metal object from your drone, you should re-calibrate. Otherwise, there is no point in doing so. In fact, if you accidentally calibrated the compass while in a local magnetic field, it would give your drone a bad calibration which could cause flight problems.
I fully agree with Wesbarris after looking at your log. Apparently you were victim of a strong magnetic interference at take off point and this interference induced around 180° compass error.
At 12 and some tenths of second, when you push the right stick the drone reacts correctly with a pitch nose down (see horizon indicator) but going in the wrong direction, i.e. E-S-E instead of W.
Soon after (around 22s) you make an half-turn as recorded by the IMU :
Likely at this moment the magnetic interference has disappeared. Then there is no consistent reactions of the drone both to altitude inputs (from 23 to 26s) nor to right stick inputs (from 27.5 to 32s) when you push the right stick full forward. The drone remains flying backward as shown by the horizon indicator, here at 29s when you get the first warning “GPS position mismatch” :
What is strange anyway is that your attempts to fly forward remained without any noticeable effect. Even if the drone was at this moment wrongly heading East due to the mismatch at take off and if it was struggling against a wind coming from W-N-W (what I think also very likely) this pretty long action on the right stick would have been reflected on the artificial horizon, either pitch up or pitch down. Yet such is not the case.
I think that you should sent the .DAT file to DJI for further analysis of this complex incident not fully explained by this likely magnetic interference.
Thanks for the expert analysis [Peio64]. Your thoughts are similar to my own!
The only thing that changes the information somewhat, is that I fly mode 1, where the right stick controls altitude with for and aft stick and move drone sideways with left/ right stick.
However this does not make a material difference to the overall result, so in the end the mystery remains.
I have abandoned any further hope of finding my old MP now, as the possible landing points are far too complex. I have moved forward and obtained another similar MP1 from a good friend on these forums - looking forward to getting back into the air again when it arrives - hopefully in the next few days.
Yes I certainly will be doing all checks and tests to make sure that this does not happen again.
Thank you all for your interest and expertise. Good to have friends like you’s when this happens.