g_config_fdi_switch_gps_with_fdi =0
Your welcome. I also own an old Mavic 1 (January 1977) in addition to a Air2S (which flyes very badly in Litchi waypoints) and a M2P. Therefore I pay attention to the possible deadly incidents with these drones.
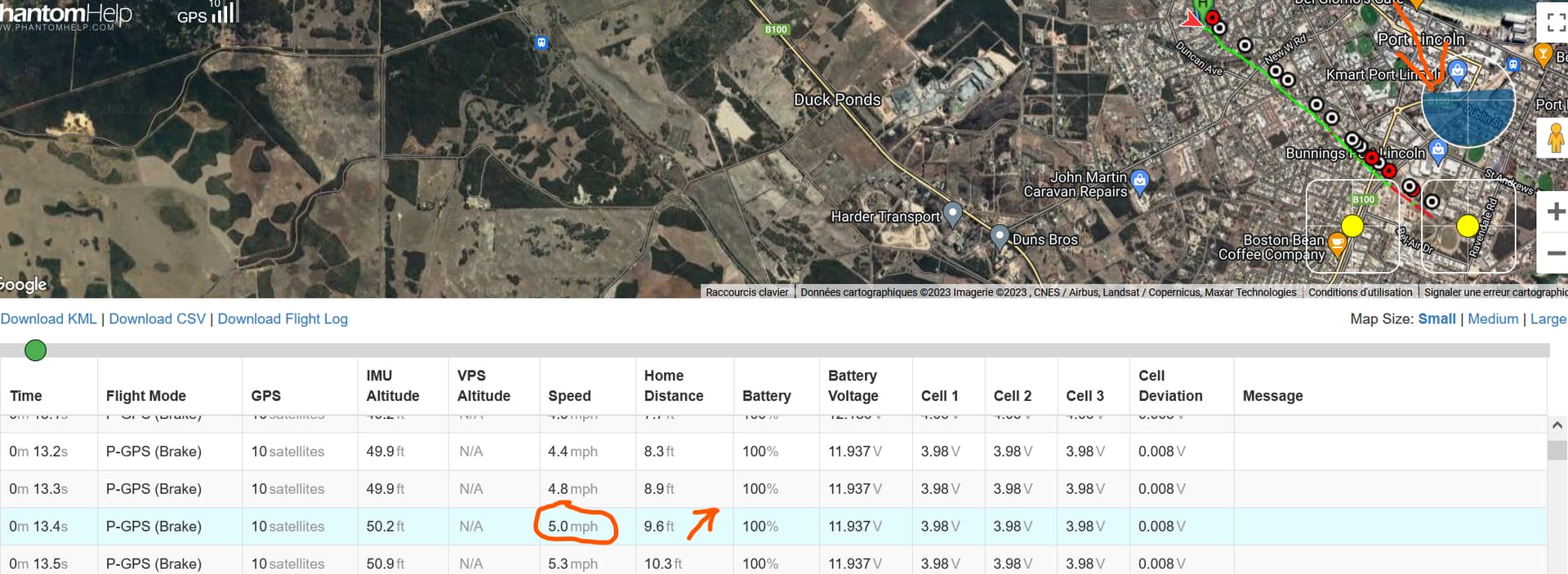
Since your RC is in mode 1 I better understand what looked to me a some strange behaviours of your drone in response to certain commands. But this info make also other data from the log even more confuse. For example at 24s you have the left stick pushed full forward which results in pitch up (It should give nose down) :
Some seconds ago (at 18s and some) you pulled the left stick resulting in pitch down
I can only explain this by a complete mismatch in the drone heading (around 180° error at take off) and the pitch command : forward became backward and vice-versa. After your half-turn you thought that the M1 was facing the home point (W-N-W) while it was facing the opposite direction (E-S-E). But to me this doesn’t completely explain why the forward and backward commands were inverted with repect to the recorded pitch.
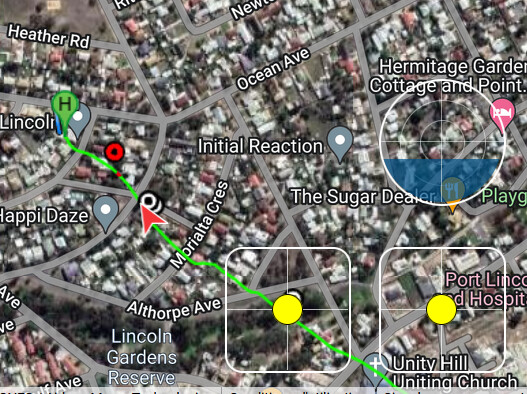
At the contrary this can explain why it flew away more rapidly when you started RTH, flying obviously backward instead of forward, toward the home point.
Was it a strong wind from W-N-W ?
Did you try this in real life ?

It would still be interesting to have the answers to these questions because they may suggest a reason for the “fly-away”:
- Your drone was pointed ESE before take-off. This is important: Does this direction match what you remember?
- It looks like you took-off from concrete. Is this correct?
1 Like
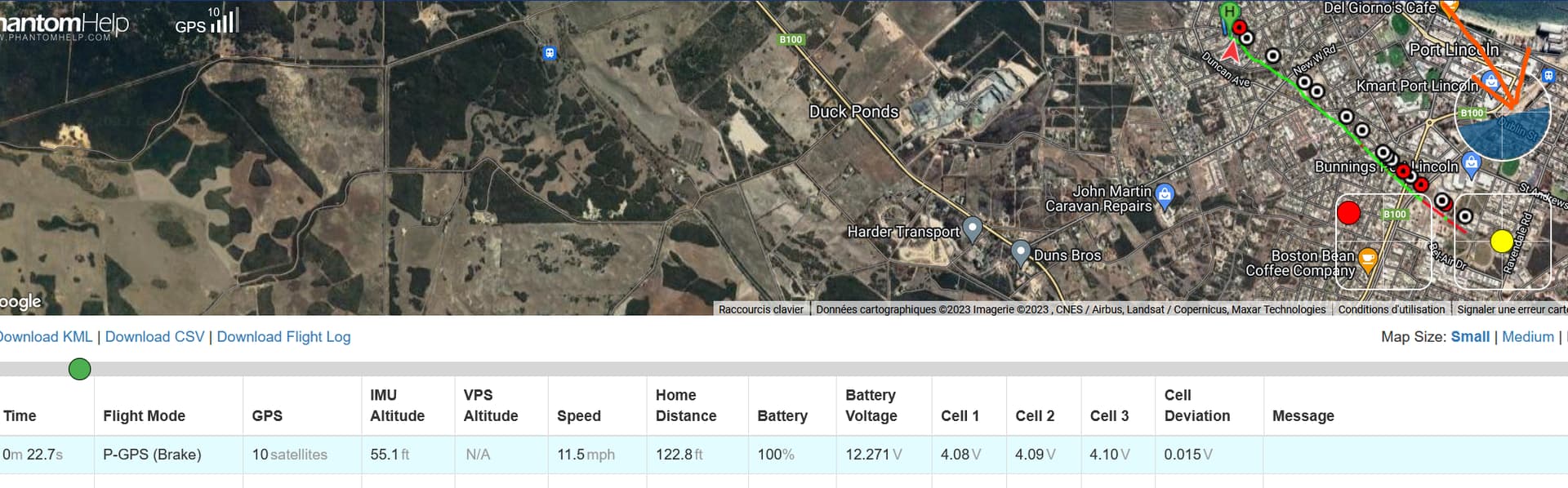
No. He was in “P-GPS” mode the whole time with plenty of satellites. Most of the mission was in “RTH” mode:
2 Likes
These statements are confused and wrong. A compass error does not disable GPS. A correct compass reading is very important at the time the drone is powered on. The compass is used to initialize the IMU. If the compass is deflected due to an external magnetic field during IMU initialization, once the drone takes off and moves out of the magnetic field that was deflecting it, you could easily have an uncontrolled fly-away.
4 Likes
Answer to No1: Yes that is correct.
No2: No, I took off from a 450mm rubber landing pad on top of the ground covered with 16mm Crushed grey granite rock. About a 2cm layer, above the usual - (for this area) Limestone type of natural soil.
As for the direction of travel being reversed, that probably occurred when I initiated RTH after that initial 34secs when I realized the (unexpected) loss of control. It would also explain the weird video that unfolded as the machine flew away. It was very confusing as my expectation of seeing the forward flight video, was opposed to what I was seeing on the screen! I was, to put it mildly - “mind boggled”
I did a quick search of that area nearly a week ago. Maybe tomorrow I might return there and have a more thorough check. Worth a look anyway! It is such a mystery and I would love to get the 64Gb nano card back as it would have some more valuable data worth looking at.
Where should I put this command?
1 Like
If the E-S-E heading at take off is correct, this incident does not rely to a compass error due to some magnetic interference induced by concrete or something else.
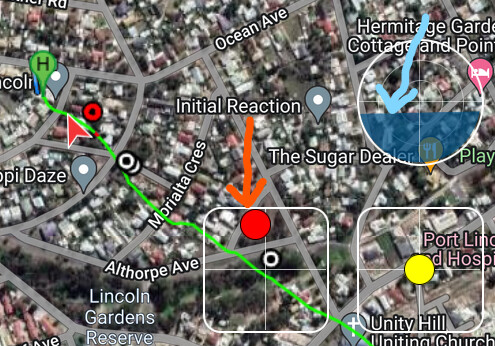
Immediately after take off, the artificial horizon displayed by PhantomHelp shows an attitude nose down and a rightward roll which could be explained if the wind was coming from E-S-E and the drone fought to keep its position.
However it is clear that without any input on the right stick it moves forward, i.e. toward E-S-E and it keeps this attitude, accelerating sl owly since it is probably pushed by the wind that I imagine coming from E-N-E. If my assumptions are correct, it looks like some glitch blocked the drone in nose down pitch and internal (gyros and GPS) as well as external (RC) commands could not counteract this wrong position. At 17.9s you command full backward without noticeable effect on the pitch down. Even if this command lasts less than 1s it should have been translated as a brake and this is not the case. Strange enough the roll and yaw internal and external commands look as working well all along the flight, this excluding a massive IMU failure.
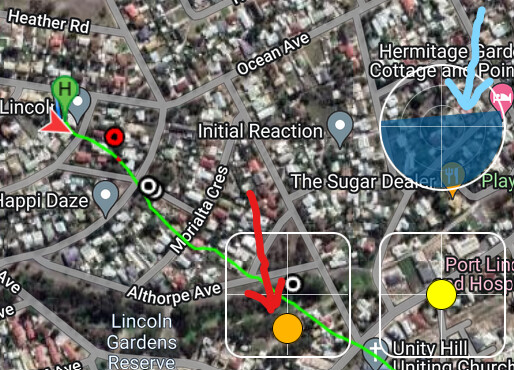
If we beleive the artficial horizon, the only occurrence where the drone looks flying a bit backward is when you push the right stick forward during your half-turn.
All this evoke a glitch in the internal attitude control which is probably not related either to the compass, to the satellite reception or to the IMU. It is also not likely that the RC was involved since attitude was already wrong at the very begining of the flight, remaining as such all along.
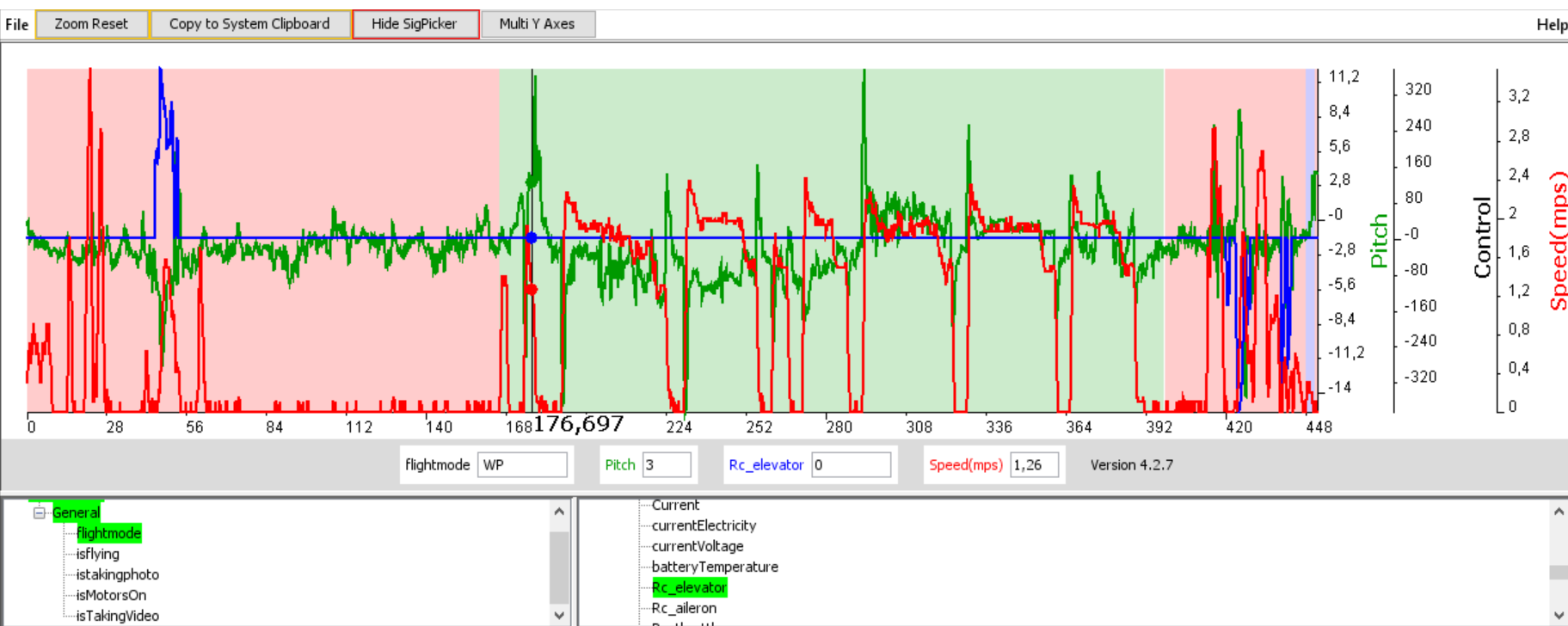
Since the drone is a Mavic 1 Pro and the flight was under Litchi, I would be interested in its analysis by the small app CsvView which is downloadable here :
Litchi stores in your device a .CSV file corresponding to your flight and CsvView can produce very informative graphs from all the data recorded. For example, below is the graph of the pitch (green line), RC elevator (blue line) and ground speed (red line) that resulted from a recent flight of my own Mavic 1 Pro (a short mission dedicated to photos). All parameters can be selected and analyzed precisely together or separetely :
Alternatively, you can share this .CSV file and I will give a look at with CsvView.
1 Like
I agree. His account of the direction his drone was pointing agrees with the log files. There is no evidence of a compass error. Also, compass errors usually result in an ever-increasing speed which is not the case here.
Yes, but the wind would have been coming from the W-N-W, blowing to the E-S-E.
My experience in analyzing flight records is very limited. Unless you can uncover more details, my suggestion to lonerangerM1 would be to post his information to the “Crash and Fly Away Assistance” section of the “Mavic Pilots” forum. I’ve seen those guys do some excellent detective work on flights gone wrong.
1 Like
I agree. LonerangerM1 could also open a ticket at DJI support with the .CSV file attached.
with this application it is not a problem to fly off into the unknown. It happened to me twice.
The automatic mission cannot be interrupted by interfering with the controls. My real experience when entering auto flight is to check where you are and where the flight start point is! Life experience.
What works there without fear is tracking.
I have zero confidence in this app.
I have it, but I don’t use it.
Most situations like this are due to the “Signal Loss Behavior” setting NOT being set correctly on VSC drones.
For Onboard Waypoint drones signal loss isn’t an issue, except for trying to interrupt a mission when signal is lost. In those cases, it’s likely a mission setting (Finish Action).
You didn’t specify which drone you are flying.