I had my first flights today with the litchi app. I tried out serveral functions. Everything seems fine until following scenario:
I was using the follow mode in an wide open area with my car. I was driving slowly across an unpaved road. I stopped 2 times to try out different follow setting (Altitude, distance,…). During slowly continous driving suddenly the app shows “disconnected” in red. The drone was approx. 20m altitude and 20m distance. I was having dynamic home point activated and passed some trees in the opposite side of the drone - see picture. I can see the drone hovering and tried to reestablish the connection. Here is the moment where everything gets interesting. Seeing the drone hovering in front of me i thought the app should reconnect in any second, which did not happen. I checked the cable between remote and mobile phone.
I have an DJI Mavic Mini by the way.
Cable is fine. I did not know where the home point was set and tried to stay cool seeing the drone hovering over a cornfield. I closed the litchi app and switched off the remote. I started the dji fly app an started the remote again. Afterwards i tried to find the drone but it was gone. Suddenly i heard the RTH sound of the remote. Beeing unaware where the current home position was defined, i really was worried about losing my drone. I abortet the RTH function and could land the drone safely. A few seconds later and the drone would have landed automatically in the trees behind me. The home point was obiously defined at the last moment within connection, which normally is fine but passing trees in combination is not.
Why did the system lost connection in the first place and why is it not able to reconnect? Do you guys have any suggestions to reconnect?
I would like to use the drone with my motorcycle and make some follow shots. I really like the speech features in combination with headset in the helmet to check if everything is fine but if i loose connection during riding my bike i will not have lot of time to react. Helmet off, gloves off, getting the remote out of the bag,…
At first it was flyiing/following like it should, then the drone stopped at the place where the disconnecting happend. I recognized the red “disconnectet” label on the display. Afterwards i stopped the car and held the remote, which was in the passenger seat, out of the window in the direction of the drone to get better radio reception. Because of the disconnection i was not able to control the drone in any way. Technically, the system should have plenty of reception (Full battery of remote, low distance, no obstacles,…). Here is where i would like to know how to react properly an get the connection back in case of future events like that? My first thought was a bug in the app so i reacted as written above. But within switching off the remote, i think the drone start to RTH after 10 seconds like written in the manual of DJI.
In my case, I have seen the connection drop many times when in “follow” mode at high speeds, but it was restored as soon as I pointed the remote at the drone.
ok, thanks for the reply. In my case the connection was not restored. I only can hope a this was a one time thing that the connection could not be restored. In future i will prefer defining a secure home point to land instead of dynamic. This can end up in me having to drive back again. But I prefer that to having to search for the drone along the way. I generally only need a few seconds of footage.
I hope the drone will fly back to home automatically if the batterie gets low, depending on the home point distance even if the “Signal Lost Behavior” is set to hover and “smart return to home” is enabled.
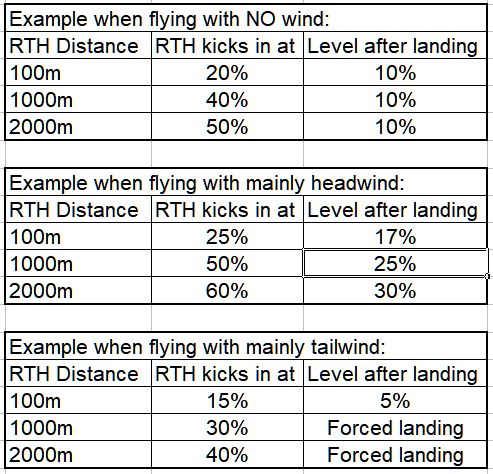
Low Battery RTH will always be executed depending on RTH distance AND battery-level, in such a way that the battery-level will be at least 10% after landing.
Yep, and once it decides to RTH, then apart from cancelling it manually by pushing the RTH/Pause button there’s not a lot to stop it from coming home to the last set home point.
Using other software I’ve been within a couple of seconds of ending the mission, when RTH has kicked in, so I’ve had to bring it home, change battery, and send it back to complete the mission…
The calculations to determine when Low Battery RTH kicks in are performed by the drone itself during flight, independent from the app used and independent from control signal.
The moment Low Battery RTH kicks in depends on the RTH distance and the amount of energy the drone has already used during flight over the actual flown distance.
Low battery warning has NO influence, it’s just a warning.
It seems that the tribar confused autolanding and rth, which he himself wrote about. The author of the topic hopes for auto-landing and at 10% of the charge he will be left without a drone
A car can act as a Faraday Cage (an enclosure used to block electromagnetic fields)
Most likely this was the cause of the lost control signal.
On a motorcycle you don’t have to worry about this.
Also the position of the RC antennas relative to the drone is important:
Thanks for this information. This was my first thought as well that the connection is lost due to bad control signal. I was holding the remote and antennas exactly as shown in the right figure of your picture. Additional i was getting out of the car and holded the remote against my drone which was approx. 25m away. The system did not reconnect. I waited at least 45 seconds, which sould be plenty of time to reconnect.