So I can plan a simple mission in the Hub and transfer it successfully to the app. My issue is that although the waypoints are set to 2 meters above sea level the results are closer to 30 meters above sea level. Is this because Im launching from a position above the first waypoint? Does Litchi assume that launch is 0 meters and therefore calculate waypoint heights to 0 + Waypoint Height? Is there a way to inform Litchi that the waypoint height should be calculated from Google Earth and not the location of the launch?Or is this a yet to be resolved bug with DJI?
In the mission hub you can set the heights as they are recorded in google, but if you have nothing to measure the height of the sea level, why do you need it?
By"sea level" I meant ground grotto zero. That is, altitude in meters as Google Earth recognises it. I am simply typing in the height into the hub, but I assume what’s happening is that the app is assuming that 0 is my P.O.D and not meters above ground (or water) as per Google Earth.
Subsequently, both the vertical height and the POI are both substantially “higher” than my Mission Hub would imply.
In a drone, zero altitude is the starting point. The same was done for the litchi application. The mission hub can adjust this height according to google maps, so it displays two heights
This does not mean at all that the drone will know the height of the sea level.
You can also come to the location, determine that the drone will take off from your hand, this will be the zero point. And set the heights of the waypoints relative to your hand above or below.
How do I set up Litchi so that when I send it to (say) Waypoint 1 regardless of where I launched from it knows that (say) 5 meters height is 5 meters above ground at Waypoint 1, not 5 meters above the height I launched from?
“You can also come to the location, determine that the drone will take off from your hand, this will be the zero point. And set the heights of the waypoints relative to your hand above or below.”
Kind of defeats the purpose of pre-flight mission programming. What if, say, waypoint 1 is over water (as it is in my case)?
“You can set the waypoint height to “-200m” which means the drone will fly down”
Yes.
But that would put it in the harbour.
What Im saying is that Id like Litchi to understand where ground level (or water level) is and fly 5 meters above that point, regardless of how high or low I have launched from.
There is one problem about which so many wrote. I turn on the drone and see on the map that it is not in the same place as the smartphone, by about 5 m.
And then the whole mission is carried out with an offset of 5 m.
Many users have written about this. This is a small problem if you are flying over a forest or a field, but when you need to fly between trees or houses there will be an accident…
So I want to say that even if the map cannot be trusted by the coordinates, then by the height you have much more chances to crash or drown the drone.
For example, I know for sure that builders worked near my house and the height of the landscape changed by ~ 3m, while Google maps show me the height of 2013, when these measurements were last taken. I don’t trust them.
Elevation Data
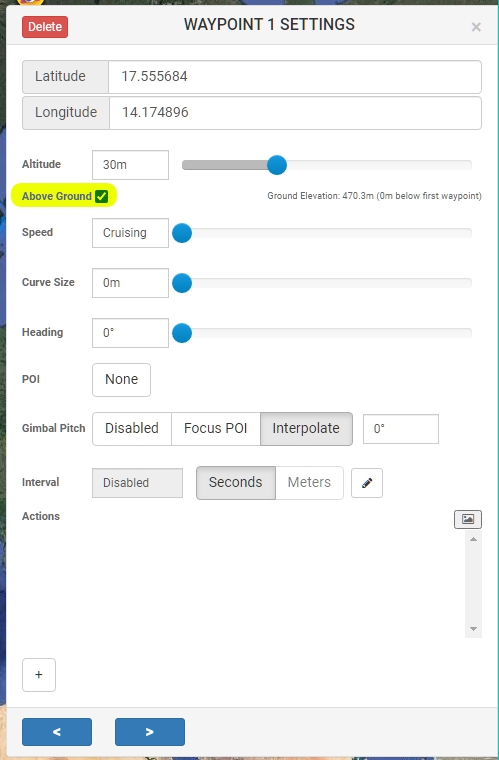
In order to use the “Above Ground” option to set altitudes, Mission Hub needs to know the ground elevation. There are two possible sources for Elevation Data.
Digital Elevation Model files
Elevation Data can be provided using a Digital Elevation Model (DEM) file. To import a DEM, go to “Missions” then “Import DEM”, then select the DEM file on your computer. Mission Hub supports Esri ASCII Grid format (.asc files) with the WGS-84 coordinate system. The area covered by the DEM file will be shown in transparent blue on the map. It is possible to import multiple DEM files.
Online Elevation
To use the Online Elevation data source, enable “Use Online Elevation” in the Mission Hub settings. Elevation data will then be provided for the whole world by our online services.