Looking for some help with the “above ground” option when planning flights. We are flying in and around a lot of hills and need to be able to tell the drone to maintain relative altitude so that we do not fly into the side of a hill. However, we noticed that when doing this Litchi is not applying the correct values in the mission. Instead, it is taking the elevation of the current waypoint and subtracting or adding to the elevation of 1st waypoint (not the take of postion - we do not begin the litchi mission until we are in the air so I know it is not using the take off postion. ). So for example, want our drone to maintain a level 45ft flight path. We have Waypoint 16 at 1485ft elevation and waypoint 1 at 1515ft. With “above ground” selected it seems like it should tell Litchi to put the drone at 1530ft to maintain the level 45 foot flight I mentioned. Instead, Litchi is saying that waypoint 16 is 30ft below way point 1 which gives us our -30ft value between the two waypoints. Litchi is then ADDING -30 + 45ft (the flight level we want) to put the drone at 15 feet above the ground at that location! How do we fix this? The weird thing is that when we use the very useful and great tool Virtual Litchi Mission to check our flight path it looks like it will work. Google earth reads everything correctly and places the drone at the correct flight level at the correct altitude. So, thankfully we did not trust Litchi completely when trialing our mission, because otherwise we would have been less a $30k drone. Does anyone have any insight on this or have any experience with this issue? We love using Litchi as it is a wonderful tool and will allow you to do so much. Would be great if we could have some assistance figuring out this issue. Thank you!

I had this same confusion three years ago when I first bought Litchi,
then I made myself sit down and sort it out.
There is no fault with Litchi.
The answer is quite simple.
Forget any relevance with heights above sea level, everything in Litchi missions is fixed to the elevation of take off position 1.
( Whatever height take off position 1 is above sea level, Litchi knows what this is but that information is not shown because it is irrelevant to the user )
You have set the drone height at waypoint position 16 to be 45 feet above ground, which Litchi will ensure that the drone will be at that height, above the ground, at point 16.
This is the yellow number 45 in the box that you have set.
The white number in the box at position 16 shows what the actual height difference of the drone will be RELATIVE ( plus or minus ) to the take off point at position 1.
This is the actual elevation height of position 1 on the ground, what you are standing on, not at all relative to the drone or the start height of the drone at position 1.
Here in your case the drone will be flying 45 feet above the ground at position 16, but at this same point the white number shows that the drone
will also actually be 15 feet higher than the ground level elevation at point 1.
ALL heights are relative to the height of the drone when a mission is started.
Normally this would be when the drone is still on the ground.
Heights are determent by barometric pressure only.
When a mission is started, Litchi takes the current pressure measured by the drone as the origin for all other programmed heights.
This also means that Altitudes are also affected by weather changes.
Is there no way to utilize the drone’s builtin downward facing sensors that provide accurate altitude readings below 5 meters during waypoint missions? Sounds like a dangerous prospect to work only on barometric difference from takeoff point, particularly when flying within a few meters from the ground.
The official dji apps don’t allow flying below 5 meters at all in autonomous flights.
It is quite simple to adjust the height relative to the takeoff point.
You see - that’s different to other information, which states that it’s relative not to take-off point, but to waypoint 1.
Not the takeoff point, I believe, but the altitude of waypoint 1
What’s “take off position 1”? You mean the altitude of the actual take-off point, or the altitude of waypoint 1? They’re different.
This can be confusing. Here is what Litchi’s manual states:
When the “Ground” option is selected, Litchi will automatically calculate the correct waypoint altitudes given the ground elevation at each waypoint, using the ground elevation at waypoint 1 as the reference. For the best results and because waypoint 1 is used as a reference, it is strongly advised to place waypoint 1 in a location close to where the drone will take off (i.e. similar ground elevation).
Since the drone will only every know its height relative to “take-off” location, Litchi must assume that waypoint 1 is located where the ground elevation is the same as that of the “take-off” location.
In order for the mission altitude settings to work as expected, it is assumed that both the “take-off” location and waypoint 1 location are co-located (at locations where the ground elevation is the same).
Obviously, the altitude of waypoint 1, in general, will be different from the altitude of the “take-off” location. If you always position waypoint 1 at or near your “take-off” location, the remaining waypoint elevations will be as you would expect and you won’t have to think so hard about this.
Keep in mind that since the drone uses relative barometric pressure to determine its height, it will only ever know its elevation above the “take-off” location.
Many thanks - that’s very helpful. One problem does remain, though. When I place the drone on the ground (at the take-off point), I need to know nothing about its altitude. If I create Waypoint 1 at or near to the take-off location, suddenly, I DO need to know the altitude. Or - am I supposed to, say, set that to 2m altitude relative to the ground, and assume that’s a good enough calibration mark? Or 1m, even.
My experience is limited, so I’d be very interested to know what those of you who have flown thousands of such missions do for this.
You are “over-thinking” this. If you place waypoint 1 at a height of 100 ft/meters then take-off at or near waypoint 1, the height of the drone (above ground) at waypoint 1 will be 100 ft/meters.
It only gets complicated if you place waypoint 1 at the top of a hill but take-off from the bottom of that hill. The resulting flight will have altitudes lower than what you might expect.
Study these 2 situations:
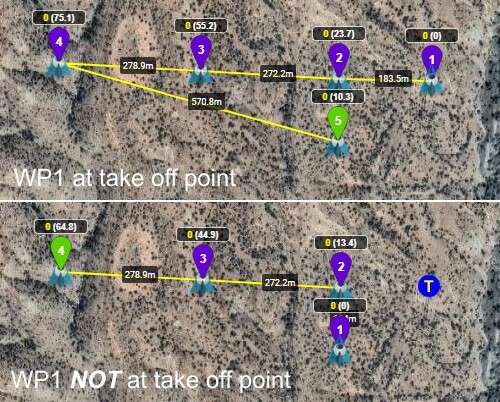
The upper situation shows the ground levels at each waypoint relative to the take off point.
The bottom situation shows that the drone will be flying 10.3 m/ft lower as intended at all waypoints.
That’s because in both situations the altitude of WP1 is the same relative to the take off point, but the ground level is not.
Above Ground calculations are relative to WP1 while at the same time the altitude of WP1 is relative to the take off point.
You will see that the Above Grond difference between 2 consecutive waypoints is the same in both situations, except for WP1 & WP2.
But… (sorry!)… the earlier comments suggest that waypoint altitude is relative to waypoint 1. So if I make waypoint 1 your 100m, that suggests that a waypoint 2 of zero altitude would also be at 100m (relative to waypoint 1)? Obviously, if the ground height at waypoint 2 is 30m higher than at waypoint 1, that zero metre at waypoint 2 would then be just 80m above ground?
I’ve tried not to over-think this, but it’s still ambiguous for me! 
That is not correct. I didn’t look to see if that was explicitly (and mistakenly) stated or if it was a misunderstanding on your part.
The rule you want to remember is that all waypoint heights are relative to the take-off location (when the “above ground” option is NOT checked).
Before exploring any other options, it would be best to understand the above statement so that you are comfortable with that.
Is it feasible for Litchi’s app to query an elevation value from takeoff lat/long and applying a delta elevation to the mission? This makes it possible for takeoff location to be almost entirely irrelevant to the mission from an elevation perspective.
Sorry, I assumed ‘Leader’ meant you’re working on Litchi.
Yes. This is essentially what the “Above Ground” option enables. From Litchi’s user guide:
When the “Ground” option is selected, Litchi will automatically calculate the correct waypoint altitudes given the ground elevation at each waypoint, using the ground elevation at waypoint 1 as the reference. For the best results and because waypoint 1 is used as a reference, it is strongly advised to place waypoint 1 in a location close to where the drone will take off (i.e. similar ground elevation). This option requires internet as it uses the google elevation data which is only available online.
No. The take-off location is very relevant as the drone’s height calculations (even with the “Above Ground” option checked) are always relative to the take-off location.
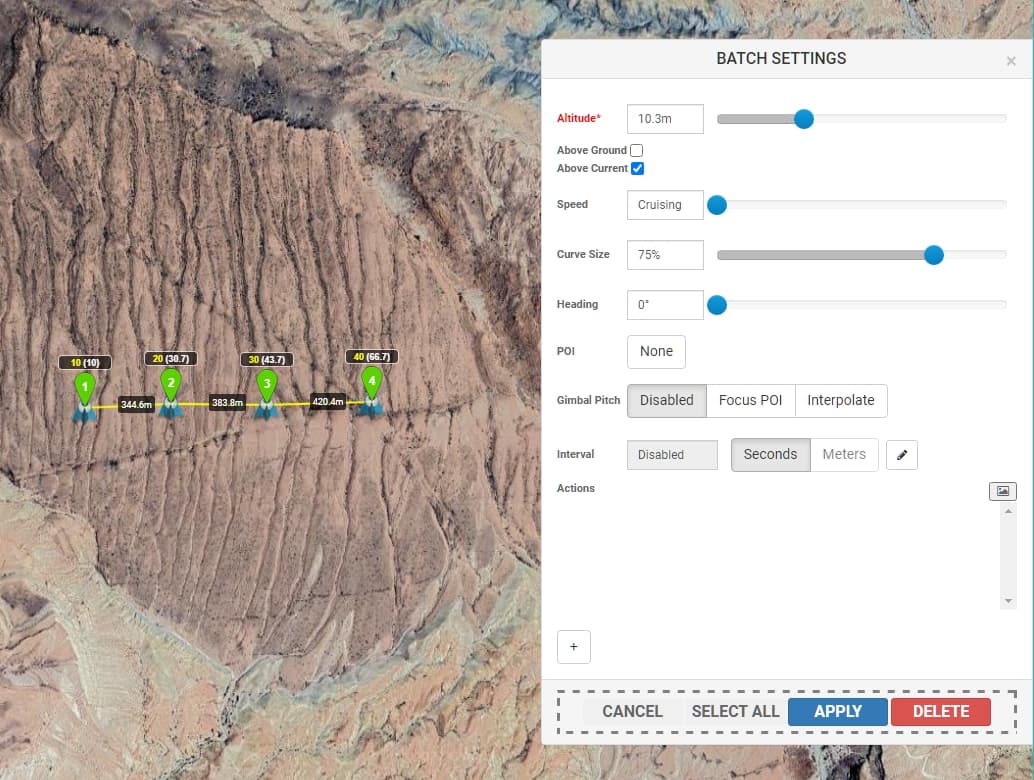
You can do this manually by using Batch-Edit.
First determin the ground elevation at your desired WP1 relative to the take off point (WP5 in Upper situation)
Then batch-edit the bottom situation to add this ground level (10.3) to all waypoints at once.
Make sure you select “Above Current” in Batch Settings.
Batch Edit:
Read the Batch Edit chapter in the Online User Guide:
https://flylitchi.com/help#waypoints-p3
Thanks, it addresses the issue for most situations, I still think the experience would be smoother if Litchi’s app automatically computed the differences to liberate the user. It would certainly add complexity for the devs.