Your toppic:
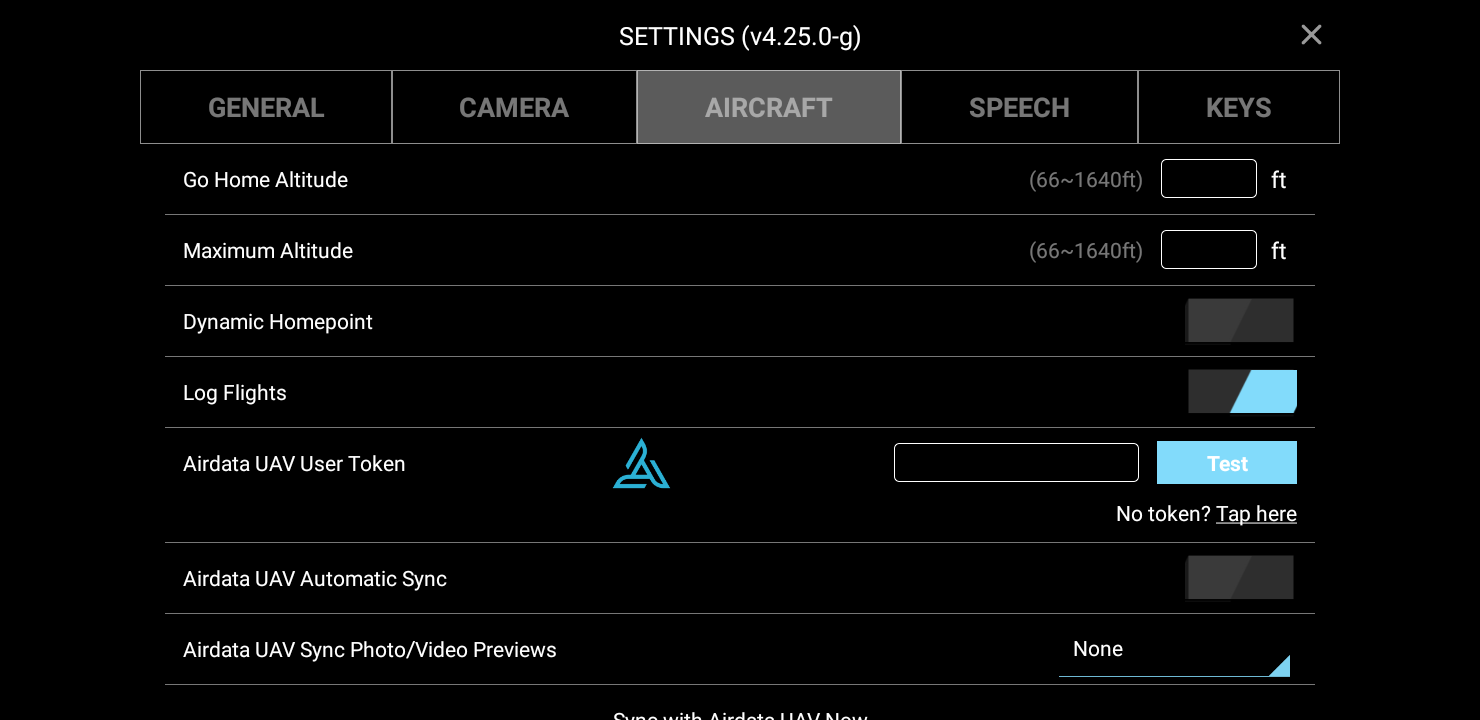
What is default maximum altitude?
First of all, why would you program a mission using metrics, then viewing the flightlog using imperial?
Post #1
but when I look at the log in AirData, the maximum altitude is 497.7’. Is it possible the drone uses a max altitude of 500’ when the units are set to imperial?
No, that’s were you stopped the mission.
It’s also the height YOU programmed at WP9 (146m=497’).
“the drone was heading straight into a tree (close to waypoint 9) and I quickly aborted the mission and brought it home.”
Post #5
Does “at maximum distance” mean that’s the furthest away from home the drone got on this mission, or that it was reaching the limit of its radio communication?
It means furthest away from homepoint the drone got.
Since you like to cunfuse yourself by jumping between the metrics and imperial system, are you sure you entered the number 500 in Litchi’s AIRCRAFT SETTING ‘Maximum Altitude’ while GENERAL SETTING ‘Units’ was set to metrics and NOT imperial.
Furthermore:
To calculate Above Ground altitudes, it is assumed the first waypoint is in the same location as the take off.

This might also explain Mad_Pup’s story (Take off & WP1 NOT in same location).