Why is this item needed?
All explained here
No, it’s not written there.
If I turn it off, the drone won’t follow me?
How is this different from focus mode?
yes it is:
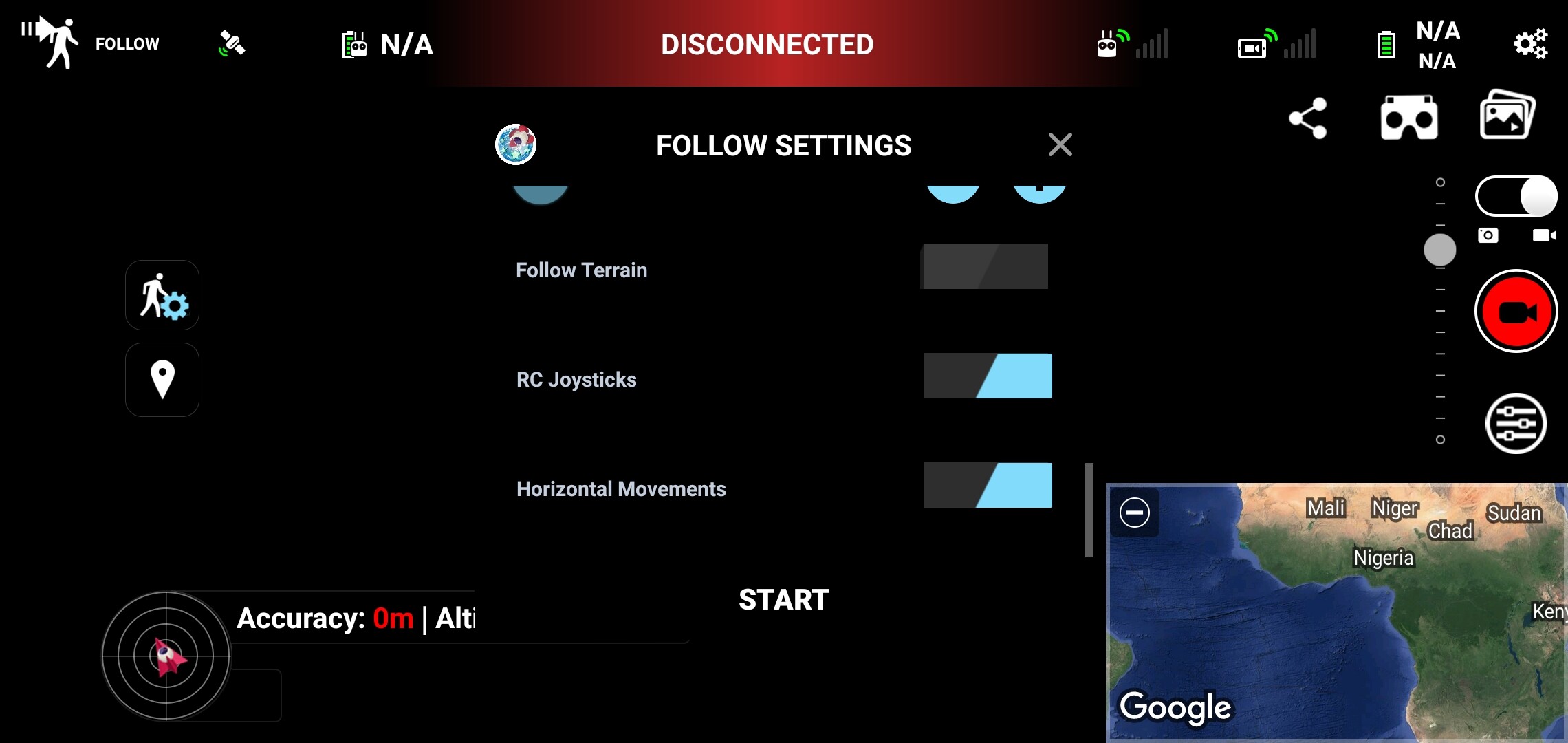
Horizontal Movements (enabled/disabled - enabled by default): When set to off, horizontal movements will be disabled and only the aircraft’s altitude, yaw and gimbal will be controlled by Litchi. This can be useful to simulate a fixed camera in the sky.
I know it. How is this different from focus mode?
I have never used it in follow mode, because it remains unclear to me how to fix the drone in the sky before pressing the “start” button, the drone determines where the height and distance are and can crash into a tree
In focus mode, the drone stays in place
I am kind of guessing here, but one of Follows major problems is often caused by (sometimes not too observant) newer users letting the drone Pan out to the side which often times can end up in a tree. If you eliminate the horizontal movement, then the drone will only Follow from a fixed position with no shifting right or left making it easier to avoid obstacles. This is at least one of the reasons that I would want this Function to be an ON/OFF choice.
2 Likes
No, it’s not. If set like this. He will still fly to the starting point
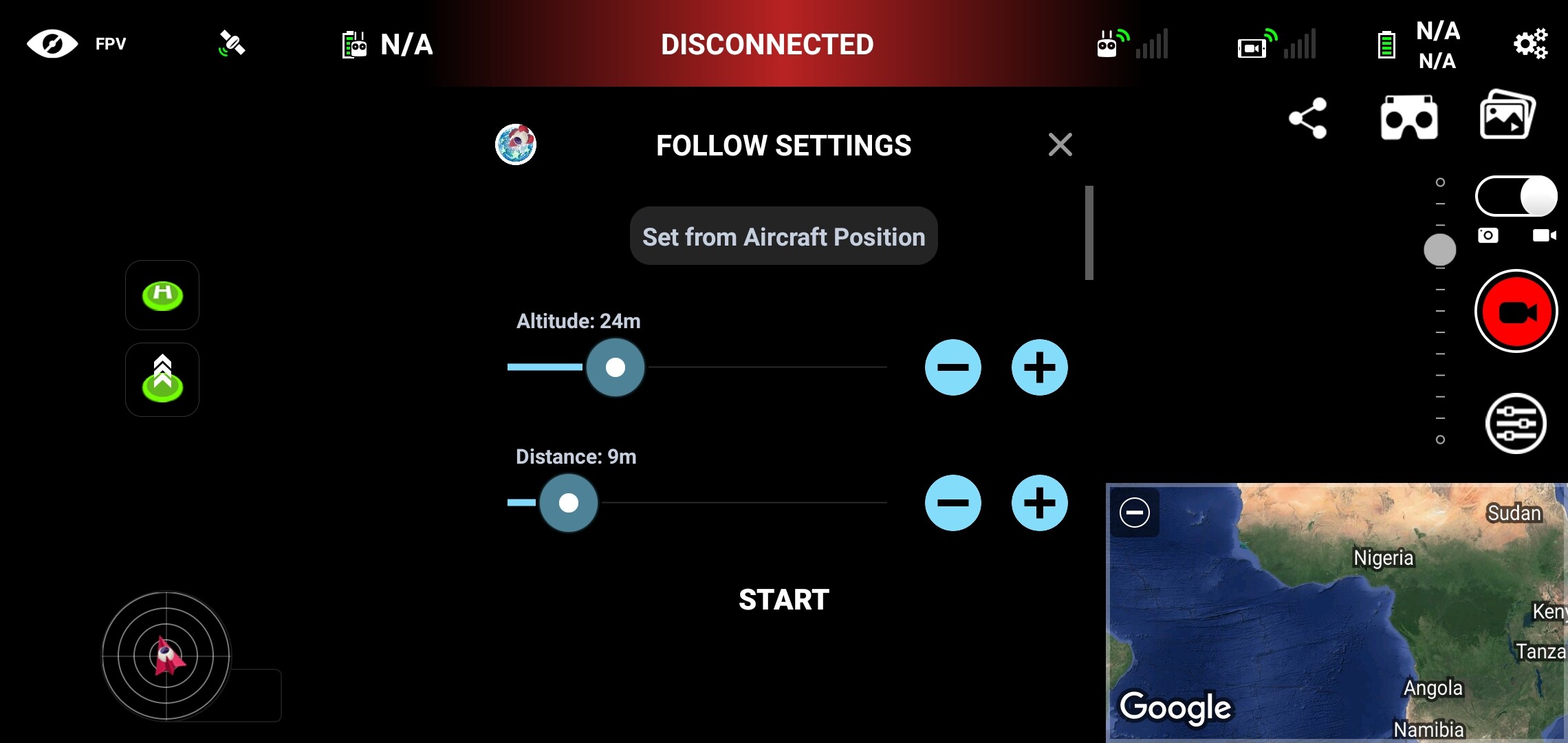
The drone will fly to a height of 24 and a distance of 9 meters. there is no way to fix the drone in one position
My question is, if I press the “start” button, will the drone fly to a height of 24 meters and a distance of 9 meters, or will it stay in place?
At the same time, in the “focus” mode, the drone always remains in the position where the user needs.
I created this thread because I use a drone in a city, I would like to set the position of the drone at a low altitude between houses, but as soon as I press the “start” button, it flies to its position. This “horizontal movements” switch should prevent the drone from moving.
In order for the drone to stay in place, I set the distance to 0 m, and the height is the same as that of the drone in the air, and then when I have already started moving, I change this distance. The problem is that I can’t always be under the drone and can’t guess where it will fly when I press the “start” button.