When planning a mission waypoint route - how much distance do I need to maintain (in mission hub) to be safe from obstacles.
This is map & GPS accuracy question.
I’d like to plan a route down a long driveway that has trees on either side (driveway is 12ft wide), flying an air 2S. Is this enough safe pathway?
What’s the possibility of hitting a tree?
Would it help if I set mission flight speed to very slow, so it will help the collision avoidance prevent a crash? Can it detect a tree branch?
I know there are no guarantees, but I’m wondering what your experience is.
From my experience, that is about the limit I would trust. I have found cases where even though the flight path is centered on a road, the actual flight was off by several feet.
My suggestion would be to set the speed relatively slow and walk with the drone the first time so that you can pause it immediately if you see a problem.
It is difficult to provide a single value for GPS accuracy. More information can be found here:
2 Likes
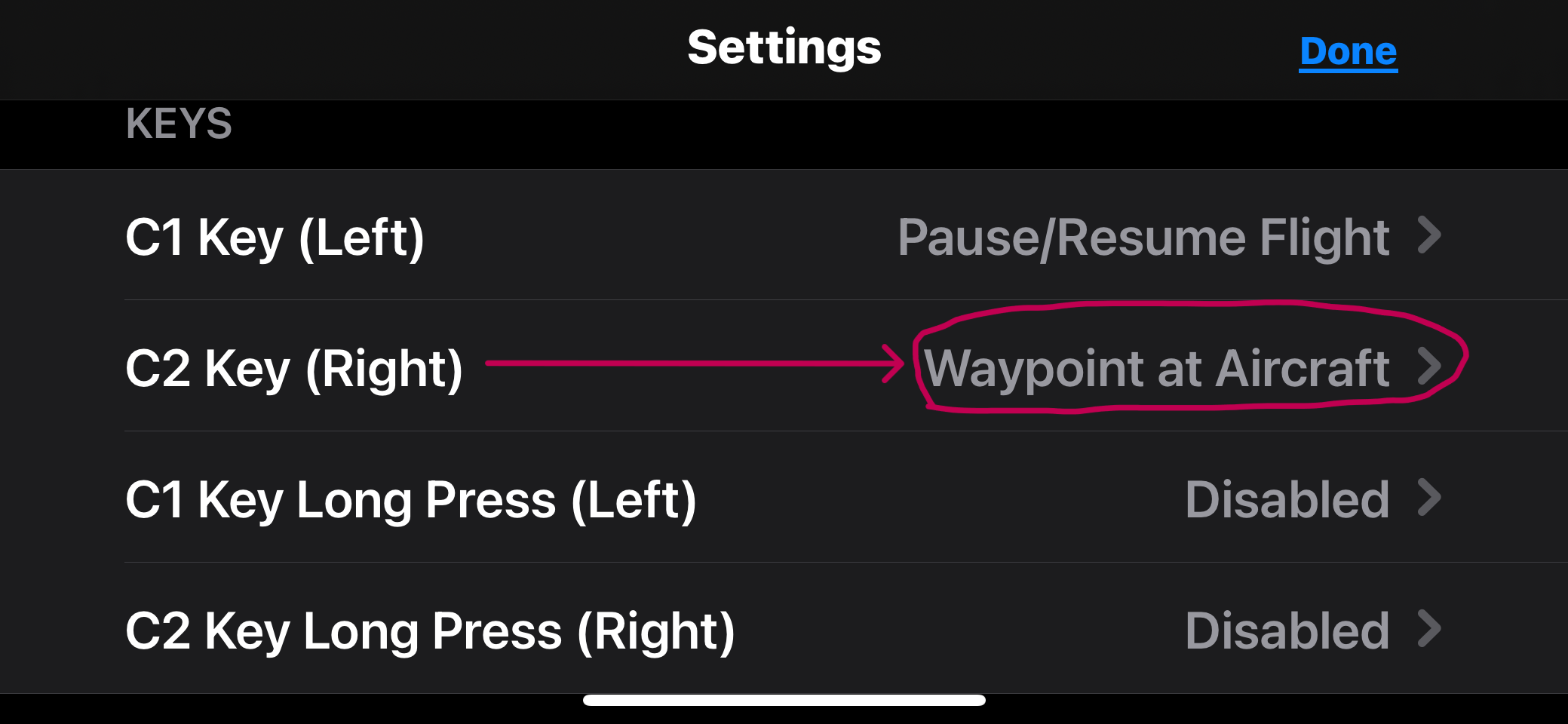
Fly your drone and set the waypoints manually. If you go into the settings on the Litchi App, you can set your C2 key to set waypoints manually at the current location of your drone. So as you fly down the road manually, using the Litchi App, you can center the waypoints at your drone by clicking the C2 button at each location, thus creating your Litchi mission “on the fly.” It’s the best way to do it for tight locations. Once the mission is created, fly to the first waypoint manually and then start you mission.
1 Like
Excellent idea! Thank you!!
1 Like