Hi, I have my mission setup with Cruising speed of 6m/s and Max flight speed of 8m/s.
For some Waypoints I defined lower speeds of 4m/s and 2m/s
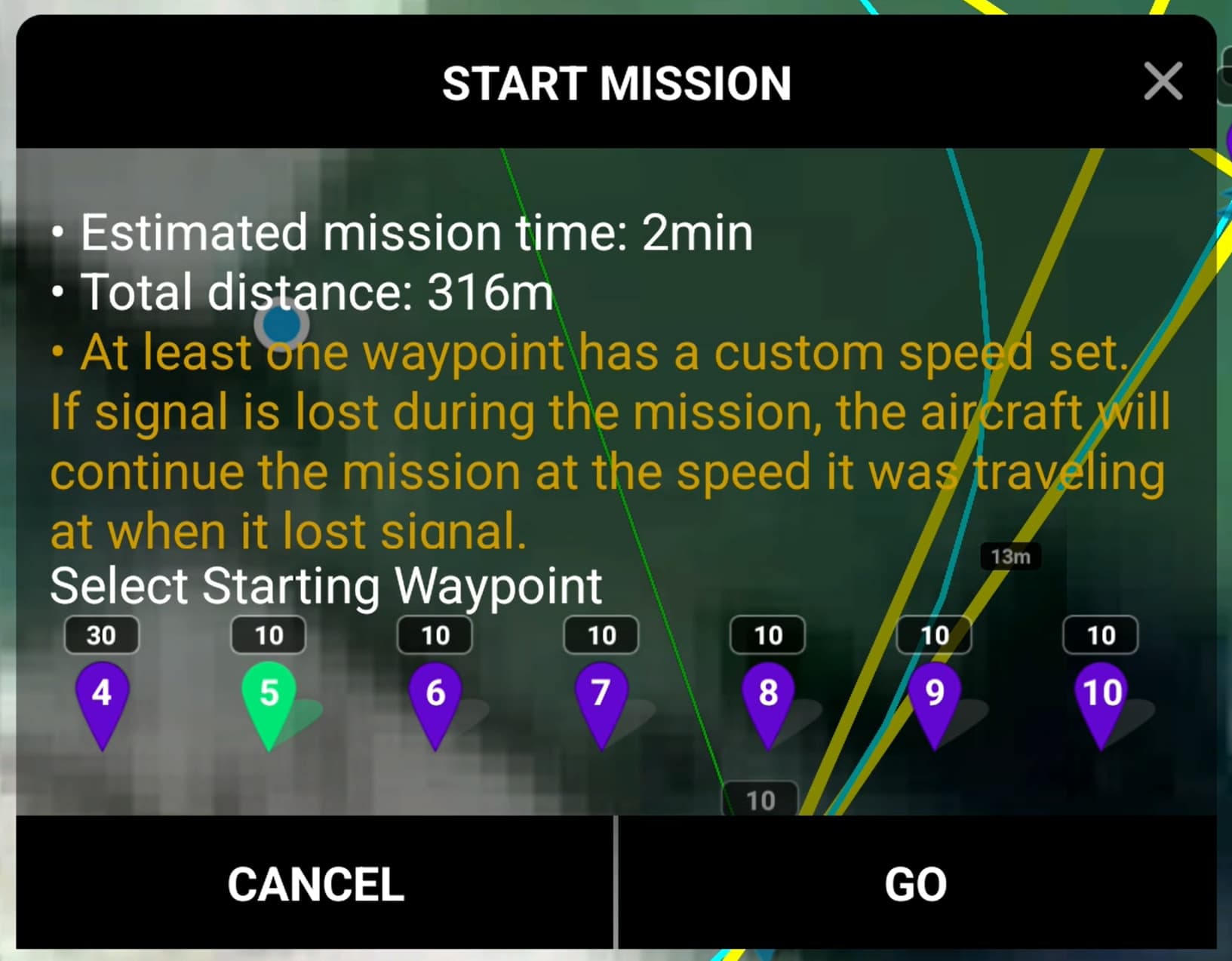
When starting the mission I was surprised by this (yellow) warning: “At least one waypoint has a custom speed set. If signal is lost during the mission, the aircraft will continue the mission at the speed it was traveling at when it lost signal”
I can’t find documentation on this warning (is it really applicable for sdk-stick-driven Mini2 ? )
I don’t get this warning when no custom speed is set for any waypoint. How come it is not applicable then?
Does this mean a possible fly away scenario? I was under the impression that Mini2 cannot do waypoints autonomously, but it can do RTH autonomously no problem - had that couple of times, usually simple autonomous rising to RTH altitude solved the signal problem.
I believe that for these “non-autonomous waypoint stick-driven drones” - like Mini(2/SE), Air2(S) - upon losing the signal, Litchi should issue full stop (via stick movements - usually stick control is the last one to go out) and wait for signal regain (I believe/hope drone issues RTH by itself), perhaps prompting the user to resume the mission.
From the online User Guide under “Waypoints”:
Litchi can control the gimbal pitch automatically during the mission, as long as the aircraft is within range of the remote controller.
Speed: This setting is only in effect when the aircraft is in range of the remote controller.
In other words:
In order for changes in flying speed & gimbal pitch to work, there has to be a constant connection between the drone and controller.
This is very important for drones older than the Mini-1 which CAN complete a mission when signal is lost.
“Litchi should issue full stop”
When signal is lost the drone will stop. Not by Litchi but simply because NO commands are received by the drone, like letting go of the sticks while manually flying.
When this interruption takes too long, the mission is aborted and the drone will either RTH, hover or land, according to your settings under “Aircraft”.
Yeah, I saw that one in the User Guide, but wasn’t much more clever with it than with the warning itself and wasn’t sure if they talk about the same thing.
So the warning is really not applicable for Mini2 and virtual-stick driven drones. Because not only can Litchi not change the speed without signal, but it cannot maneuver at all without signal
Regarding the signal-loss scenario - you describe it as I would expect it to be. The warning just really confused/scared me.
 )
)