when flying a mission lets say 200-300 waypoints, some hundred hectars. I need to move while flying but i can only set one “nr1” point from which the height above ground is calculated. if this is not the highest point in the mission and after 2-3 battery swaps i need to go to a higher point to have a good Connection to the drone. what will be the height above ground now ? the one i planned in Mission planer looking at waypoint one or the one where i restart the drone later on ? maybe somwhere around waypoint 90 ?
This means that if your (new) take off point is at a higher or lower level then wp1, the drone will also fly higher or lower with the same amount for the rest of the flight (or whole flight).
If you use ‘above ground’ in the planned mission, litchi recalculates the heights at every waypoint relative to wp1. These recalculated heights (the ones between brackets) are send to the drone and are only correct when the take off point is near wp1, or at least at a point at the same level as wp1.
Example:
For the whole mission the drone should fly 40m above ground.
Wp50 is above the top of a hill which is 50m higher then wp1.
The recalculated height for wp50 is 40m + 50m = 90m relative to wp1.
When you restart the mission at wp50 (new take off point) and choose wp50 as starting waypoint for the rest of the mission, the drone will rise to a height of 90m instead of 40m.
In other words: the drone will fly 50m higher then planned for the rest of the mission.
It would be nice if this was the case. However, as Martin pointed out, the above ground option is still dependent upon your take-off location. See this:
But wouldn’t it be be an Option for litchie to recalculate the heights depending on (re)starting waypoint ? it would make things on big Missions much easier. Basicly add / sub the diffrence between (re) starting waypoint to the first homepoint ? Since the Overlapp is also calculated on the first homepoint in usual Missions. And in big missions in mountainous Areas it is not always easy to keep the same height for each restarting point.
This is a bit of a “brain teaser”. However, I think that when both of these conditions are met:
Your mission is planned using the “Above Ground” option in Mission Hub.
Your take-off location is at the same elevation as WP1.
Then, it shouldn’t matter what waypoint is used to begin your mission. You should be able to take-off, then execute your waypoint mission and select any waypoint you wish to start your mission. The waypoint heights have already been locked in using the above ground option. Your take-off location is at the same elevation as WP1.
Does anyone have experience doing this? I think it should work based on my understanding of this option but I have never tried it. Therefore, I cannot be 100% confident.
the second condition is not always met because as i said hilly area. If the second condition is met it works out fine. But if i do lets say 60 WP and then go further in the Mission (maybe to waypoint 80) to keep a stable connection (hilly area) you are probably not on takeoff height at WP 1.
So well i make up a quick 80/80 overlapping Mission to explain at a screenshot.
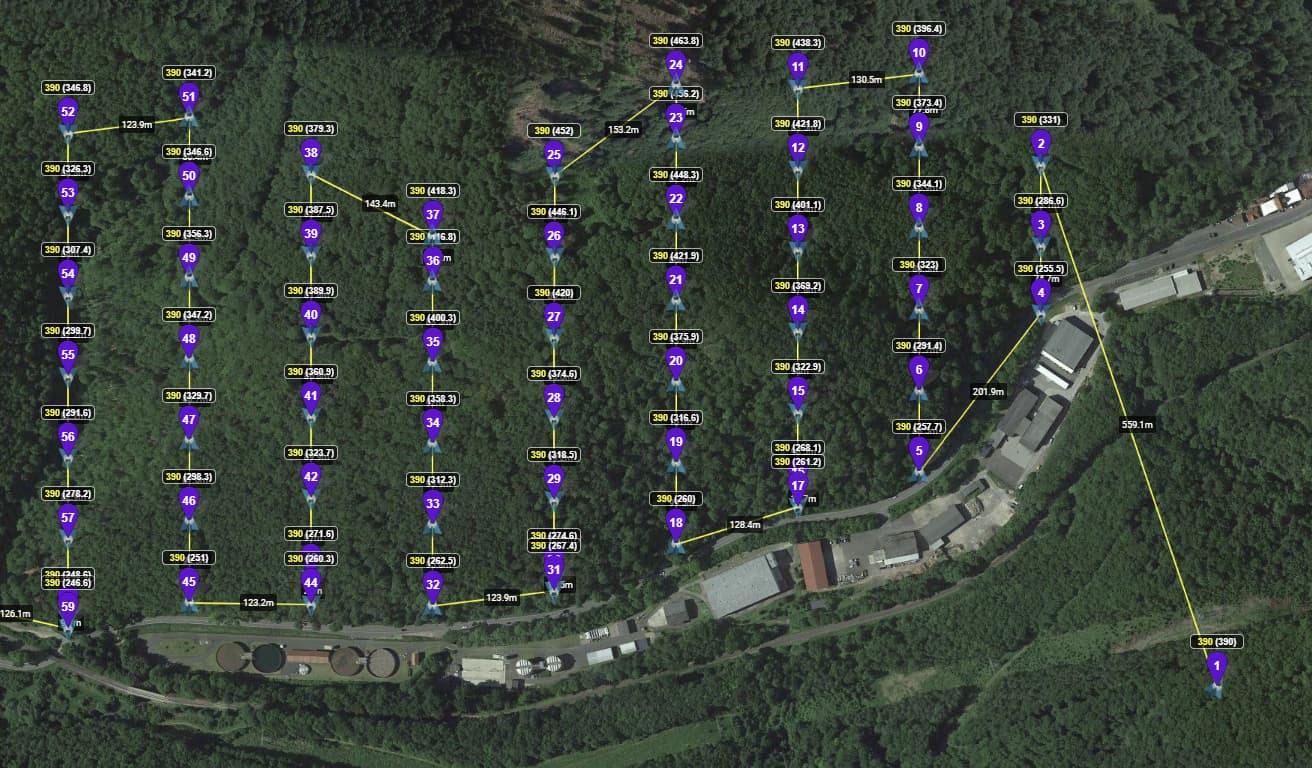
So just for theory. I made up a Test Mission with bigger diffrences in Elevation. Which would be quite normal in a hilly area.
lets say you start at WP 1. Which ist just for practice Z=0 Drone will fly 390 above Z=0 at WP 1 and all following waypoints relative to this. This will work out fine for the pre calculated Overlap. So you fly till maybe WP 24. Connection gets bad. Stop Mission. Make your Way by car to lets say WP 32. Restart Drone and Mission at WP 32 (e.g.because of a better connection) now you are about 130m deeper than at WP 1. Starting on the grond below WP 32 your Z will be about -130. If you would fly the next 25 Waypoints from here now, lets say flying at Waypoint 26 where you should be at 446m above WP 1 in theory you would only be at 446-130=316m above Waypoint one because the height ist calculated from starting Position which is now at the ground under WP 32.So now the drone is 390m above ground height at Waypoint 32 but only 260m above starting height at Waypoint one height.
So this is what i think happens. This of course affects the Overlapping drastically if i am right.
So the question ist if it would be implementable to calculate Mission height always the way it is planned / or at least have the option to do so (of course in the 500m limit). Since litchie knows the Z-Values from calculating anyway it would just have to add/sub the difference at the actual starting point to keep the overlapping properly adjusted. This would probably help a lot of people to do better mapping in hilly areas.
The same by the Way, maybe even worse should happen when mapping in urban areas. Starting on a rooftop or on the Street (because the plans change all the time, when you are “out for the job”) will make a huge difference, especially flying as low as you are mapping buildings with low GSD. Having 5-10 m height diffrence should make even an bigger impact on overlapping when only flying at 60m for example.
I understand what you’re saying. When you are forced to move the take-off location to complete different parts of the mission, it makes maintaining a desired AGL difficult.
I don’t have an easy solution. I can only think of complicated solutions. For example:
Design your mission as you already have with a take-off location in mind.
Anticipate:
a: Where you will need to break this into sub-missions (after WP24, etc.).
b: Where your take-off location will be for each sub-mission (near WP32, etc.).
While planning the mission in Mission Hub, drag a line from the initial take-off location to the anticipated take-off location for each sub-mission. Note the difference in elevation (-130). Don’t bother saving the line – it was just used to determine the difference in elevation.
Take your original mission and save it as another mission (Mission Part 2).
a: Delete all of the waypoints up to and including WP24.
b: If the second take-off location was 130 lower than the first take-off location, add 130 to the height of this new WP1 (formerly WP25).
This should allow you to complete (or continue) a mission at the same height as originally planned. I know this is ugly but it is all I can think of right now to be able to complete your project.
@wesbarris are u a litchie dev ? (since u gut the logo in your picture)
Don’t u think this could be quite easy to implement to the mission planner ?Should i just do a new topic in ideas and suggestions ?
I’ve tried several “work-arounds” and they will do the job. But it ain’t as good as it could be and all of them result in making mission planing more difficult than it should be or making the mission way longer cause you increase the overlap over the whole mission.
Since several people are using litchie and waypoint missions for Mapping and this would be something so easy to fix (as described in my last reply) by just add/sub the difference between WP 1 and (actual) starting point to the values. Litchie has all Data anyway and it’s just a simple Addtion/Subtraction Algorithm. I feel like i could write it XD