The mission:
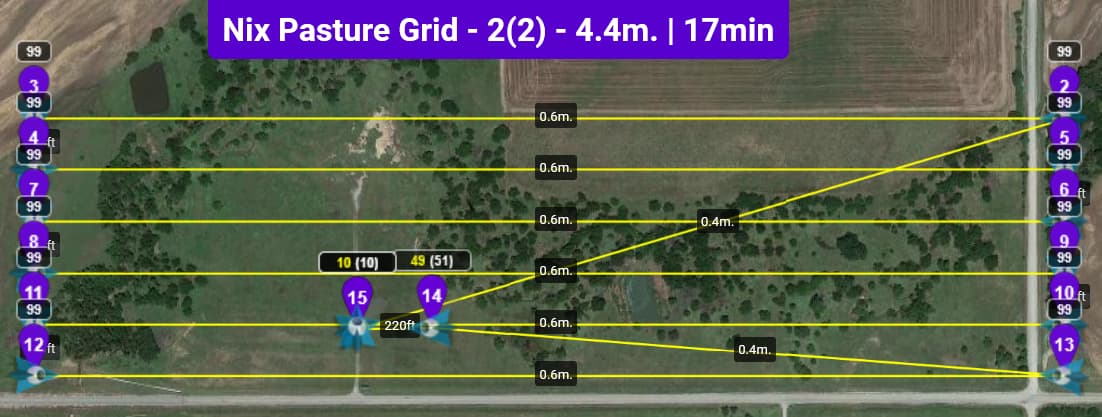
The flight:

The result:

Recovery team:

Almost there:

Got it:

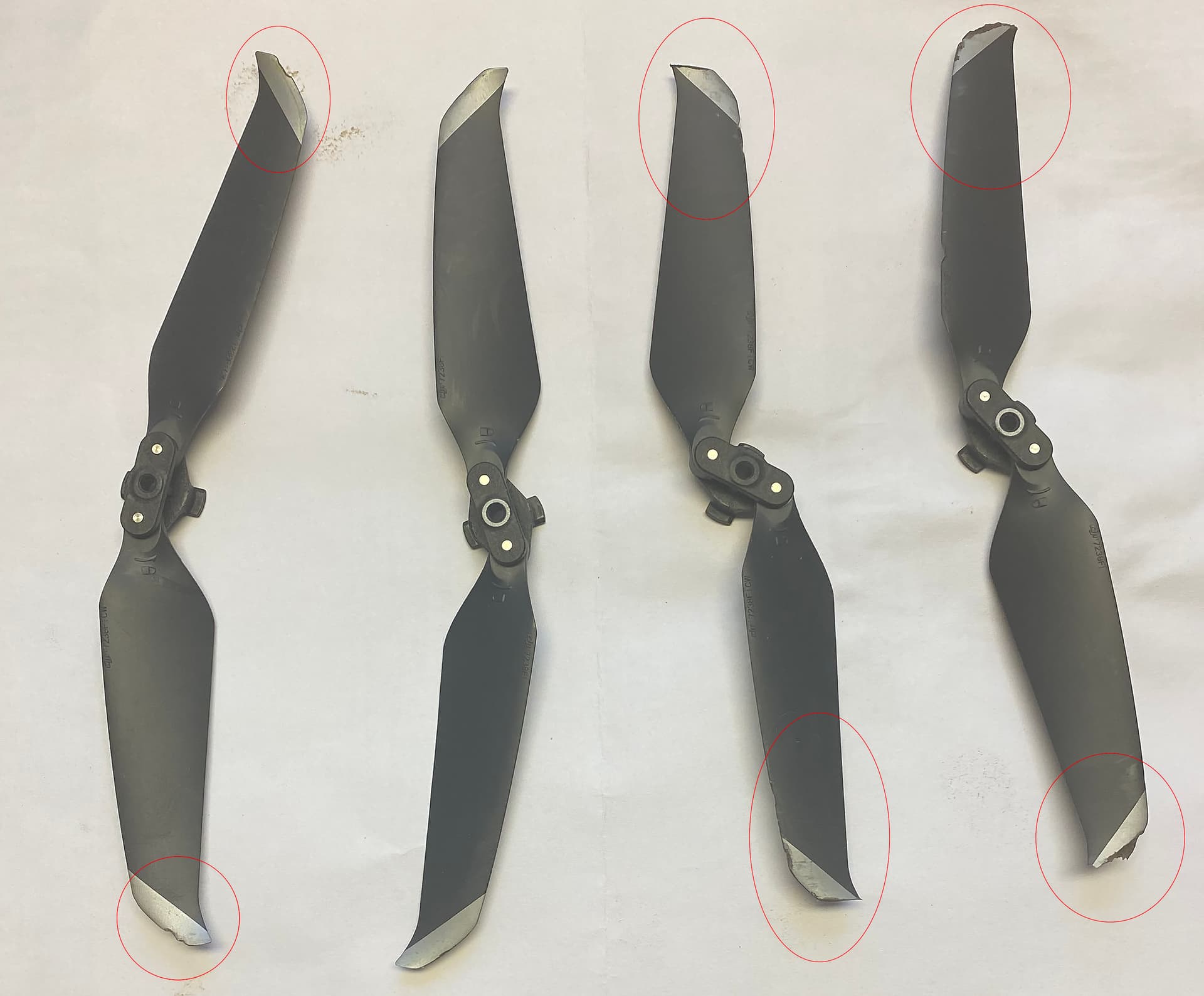
Damage report:
ouch, glad you found it!
The drone was still on-line after impact and communicating with my smart controller. Other than navigating terrain, finding it was piece of cake 
Lucky you were able to muster up the help to retrieve it! I had a similar lesson in February: I had overlooked the important detail that the climb angle from WP1 (at 10m) to WP2 (at 45m) would intersecting with the top of a 27m (90ft) pine tree. I was able to get a professional tree climber friend to retrieve it from where it fell into branches at the 21m level. Now I always fly it manually to carefully check any tall obstacles, and plan my mission to be above them from the start.
Good neighbors and family are definitely an asset. I normally have at least two preparatory waypoints at the start of a mission but this time not.
I used two in-house Excel based programs to create the mission.
One to generate the grid search pattern. And another which adds pre and post waypoints to any Litchi mission.
I use wp-1 to bring the aircraft up to a low altitude so I an check it is operating properly and wp-2 to take it to a safe altitude and avoid an obstacles in the immediate launch area. This time, I didn’t set wp-2. Lesson learned.