Olá, Ramon.
Com o Litch voce tem a opcao de planejar o voo com altitude em relacao ao ponto de decolagem (ABOVE TAKE OFF) ou em relacao ao solo (ABOVE GROUND).
De fato, conforme o Mike_M citou, voce já pode planejar a missao com a opcao ABOVE GROUND, isto é, com AGL (ABOVE GROUND LEVEL), assim, independente do ponto de decolagem ou da elevacao do terreno, a altitude do waypoint é em relacao ao ponto que esta sendo sobrevoado.
Isso já é o suficiente para voce fazer o que precisa. O único porém é investigar qual é a base de mapas de elevacao do que o APP utiliza, e verificar se isto é confiável para a sua área de voo.
Ou seja, nao consigo replicar o seu problema.
Com o plugin de QGIS, por padrao o CSV gerado automaticamente é com altitude/altura AGL. Isto é a coluna #39 altitude mode:
0: above take-off
1: above ground
Infelizmente o litch nao permite trabalhar com altitude absoluta Above Mean Sea Level.
Assim, quando voce importar no Litch, o CSV será convertido a uma missao com altitude/altura AGL.
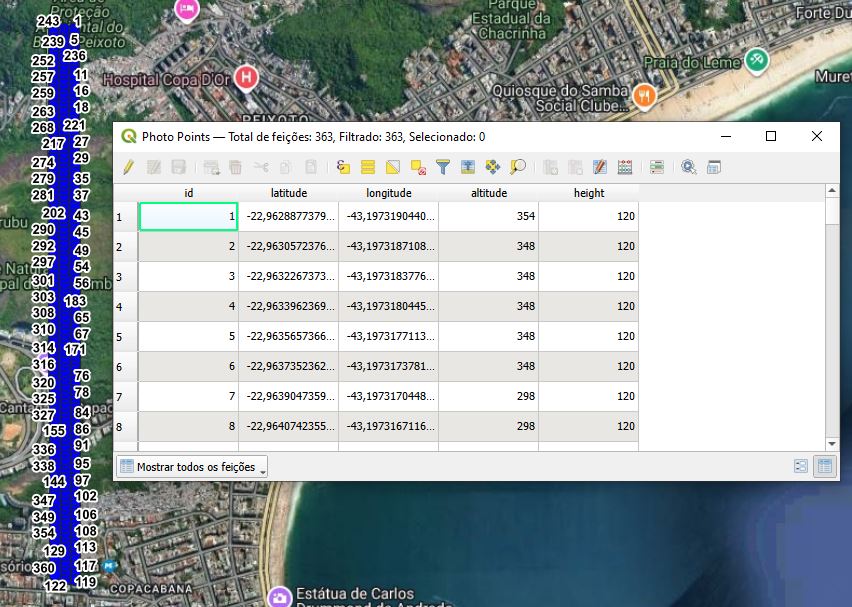
Porém, o que eu estava tentando explicar é que voce também tem a opcao de gerar um CSV manualmente com alturas em relacao ao ponto de decolagem. Para isso voce deve inserir um modelo digital de elevao (DEM) quando usar o plugin de QGIS, assim a camada gerada Photo Points com os waypoints terá a coluna “altitude”, que é a altitude absoluta (AMSL Above Mean Sean Level). E entao voce poderá usar esse dado de altitude absoluta para editar manualmente o CSV, substituindo a altitude em relacao ao terreno, por uma altitude em relacao ao ponto de decolagem calculada por voce.
A altitude Above Take Off é:
altitude Above Take Off = “height” - “altitude” - “altitude ref. take off”
Onde,
Altitude Above Take Off: é a altitude que deve estar no CSV que sera importado no Litch.
altitude: é a altitude da camada “Photo Points” gerada pelo plugin.
altitude ref. take off: é a altitude do seu ponto de decolagem
Lembrando que nesse metodo, no CSV, voce também deverá editar a coluna #39 altitude mode para 1.
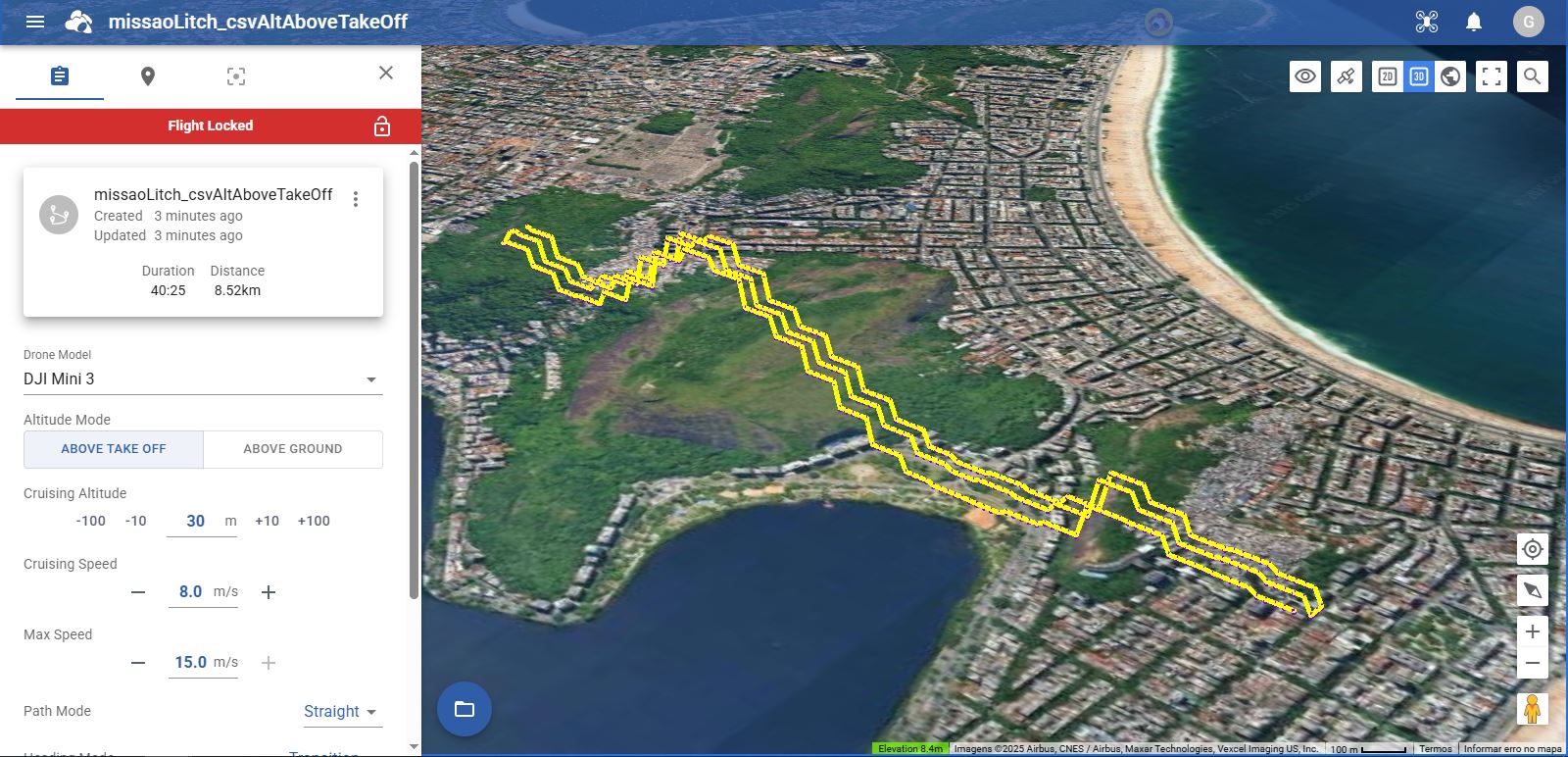
Segue em anexo exemplo do CSV gerado pelo Plugin (Above Ground) e um CSV gerado manualmente por mim, considerando o ponto de decolagem com altitude 234, isto é, a elevacao do ponto 1.
Evidentemente, que no seu caso concreto voce precisará revisar o CSV para cada local de decolagem. Mas com alguma habilidade de programacao voce pode automatizar esse processo.
De fato, gerar um CSV para altitudes Above Take Off é trabalho e exige a revisao para cada local de decolagem. Porém esse método tem a vantagem que voce poderá utilizar com um modelo digital de elevacao melhor (mais atualizado, com melhor resolucao espacial, etc…) que o modelo adotado pelo Litch.
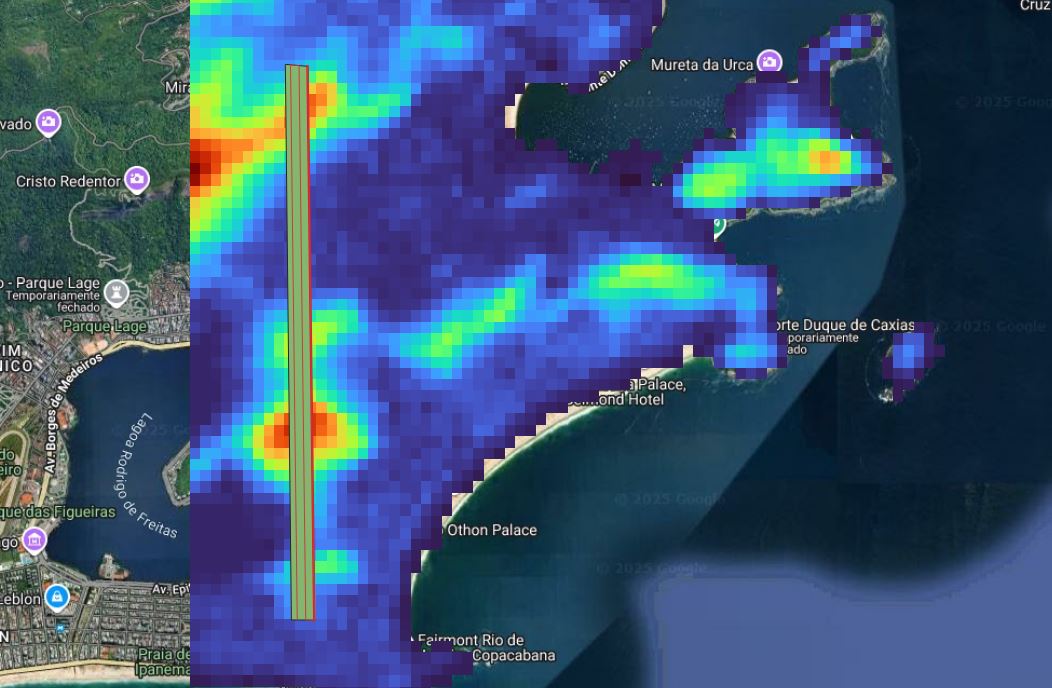
Planejamento no QGIS com o plugin e modelo digital de elevacao.
Camada Photo Points com coluna de altitude AMSL.
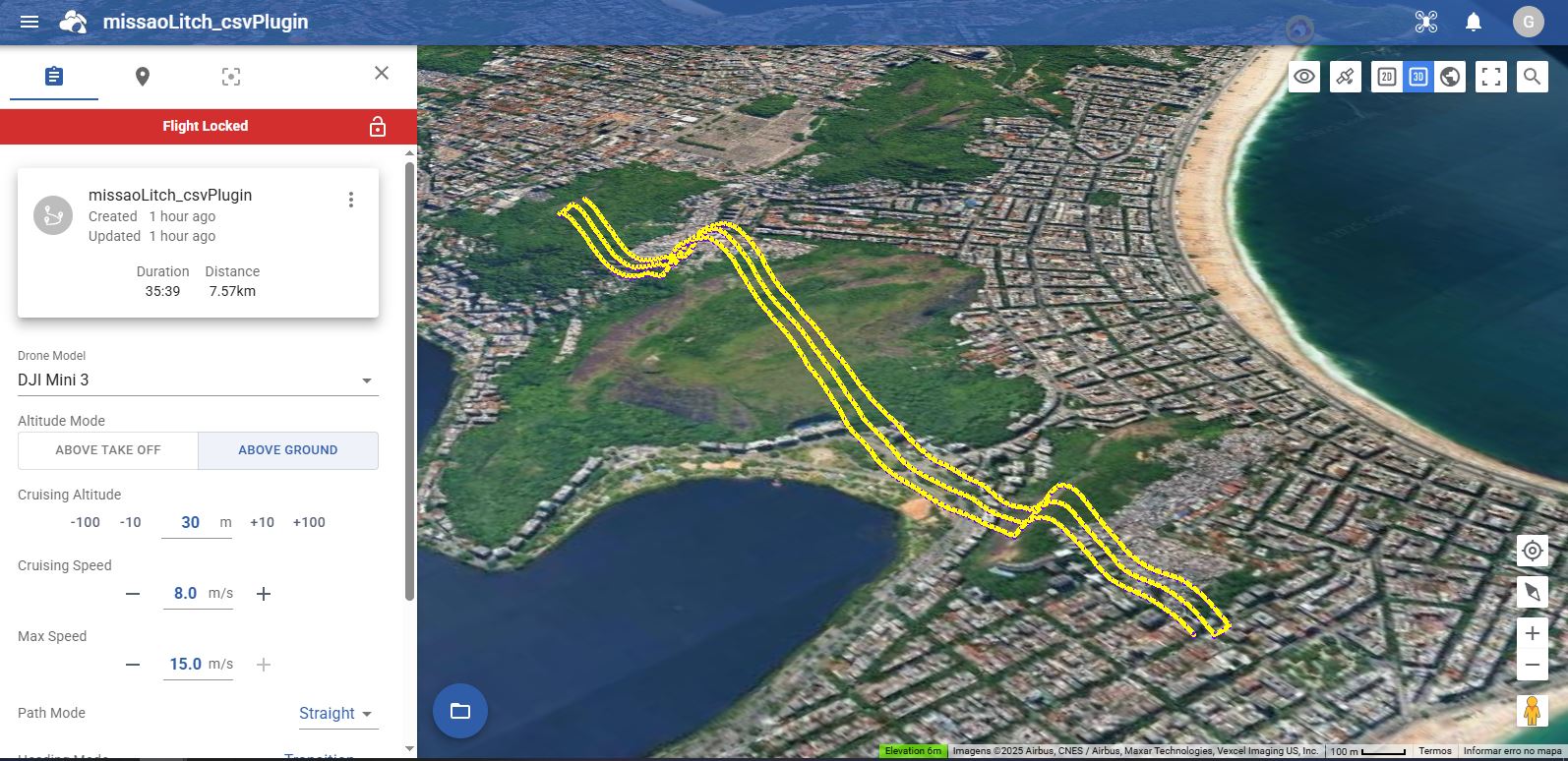
CSV gerado pelo plugin e importado no Litch, com altitude Above Ground.
CSV manualmente editado para usar altitude Above Take Off (elevacao do waypoint 1 = 234m) e importado no litch.