Why is the drone flying so slow when flying a mission ? i set the speeds in the flyhub both to max but between waypoints the max speed the drone flies still is 10 km/h forward and 2-3km/h up and down ?
it would sped it up a lot if the drone would at least fly 30km/h betwwen the waypoints.
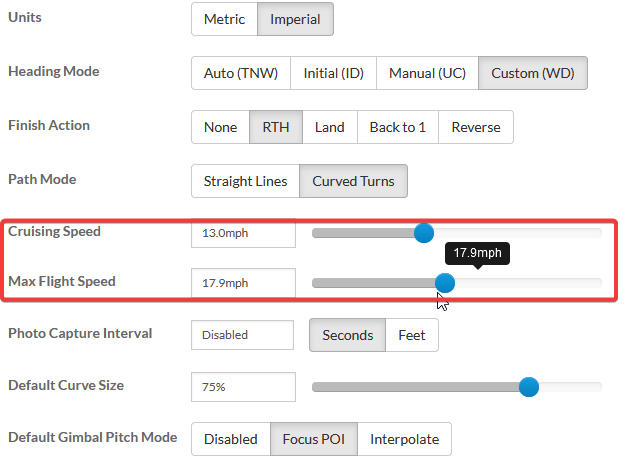
If you want the drone to fly at a constant speed for the duration of the mission you only need to set the “Cruising Speed” in the “Settings” dialog. Then, leave the speed slider for each waypoint all the way to the left which will cause the drone to use that cruising speed.
Hello, I am new to Litchi Hub and need clarification on your response. Are you saying that in order to maintain a constant speed for the whole flight set the waypoint speeds to zero then in the global setting place your speed at the desired level? Is this the only way to do this? Will the program ignore the cruise speed if the speed is set in the waypoints? I just flew a mission I had originally planned in Mission hub that had waypoint speeds all set the same and the drone would speed up between waypoints and slow down at the way points. It was as if the the drone was following the cruise speed and maximum speed and going back and forth in between them. Thanks for the help
It sounds like you were flying a “straight-line” mission. With the “Path Mode” set to “Straight Lines”, the drone will momentarily stop at each waypoint. If you fly a “Curved Turn” mission, the drone will fly the entire mission at the “Cruising Speed”.