Hi everyone,
I did a grid route test to learn the basics of orthophotography.
I describe the problem with the help of the following image:
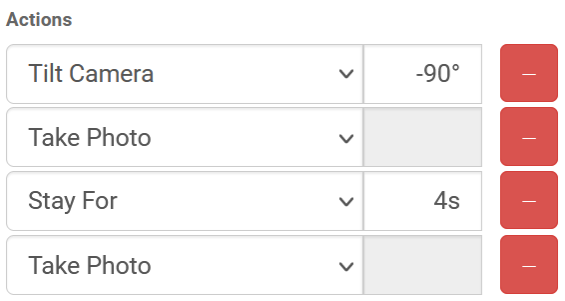
Once I arrived at WP69 I expected the drone to perform these actions in the following order:
1.- change heading from the value of WP68 (253°) to the value of WP69 (73°);
2.- tilt camera to -90° (but it was already at the previous WP);
3.- take a photo.
The problem is that at WP69 the drone takes the photo while it is still rotating to reach the correct heading.
This results in a photo that is misaligned with the next one.
Is it a bug, is it something I am doing wrong?
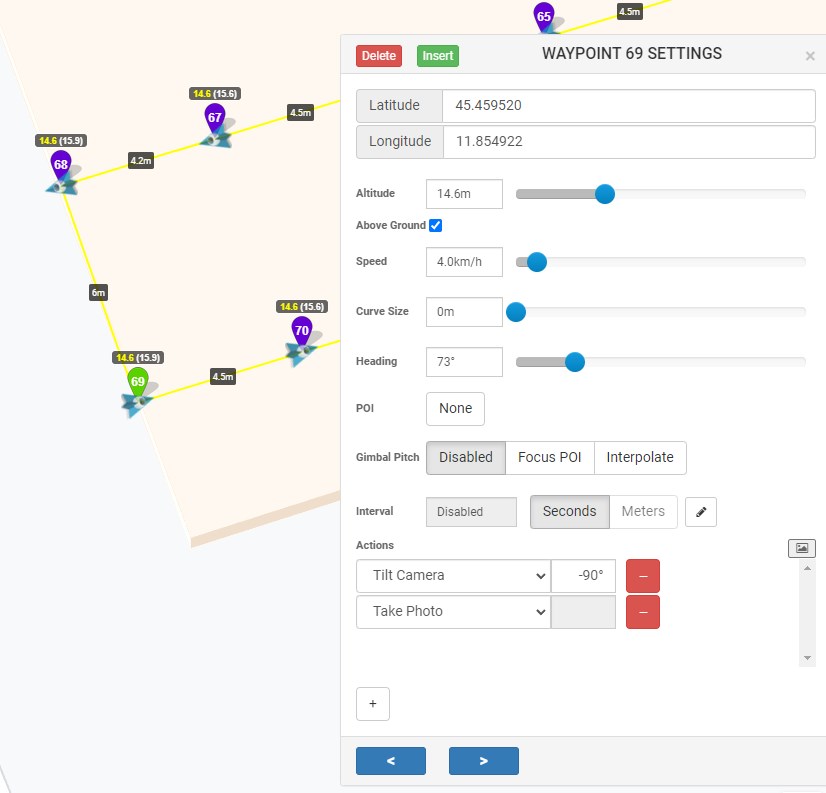
In the attached screenshot I have also enclosed the WP69 parameters.
Thankyou