I know someone will chime in saying this is dangerous. But it’s not. Nothing but nature under this drone when it’s not in my control. I wouldn’t trust it otherwise.
Ok, while flying waypoint missions- after signal loss I am constantly getting what I guess are blips of a signal, and that triggers a return to home…despite having everything set to “continue” on signal loss. Finish action is set to “none” and on the RC2 it does reflect as “continue”. Any ideas?
It would help in answering this question if we knew what country you are in. DJI drones may have different behaviors depending on your country. We would also need to know what drone you are using. This also will affect the lost signal options. Also, you mention the RC2, so it is not clear what app you are using.
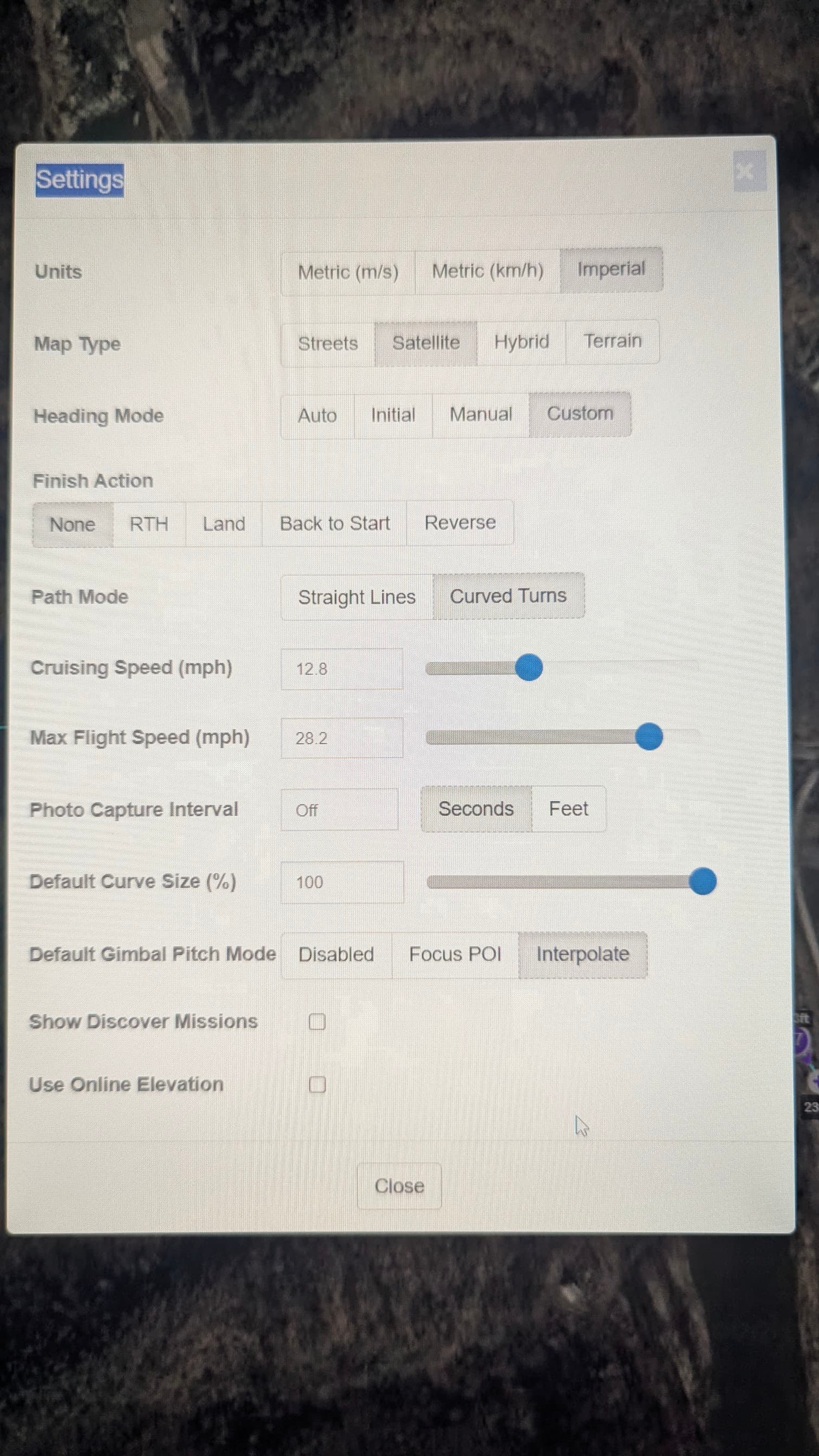
In more than 90% of cases, setting the “Finish Action” parameter to RTH is the most appropriate action. There are situations where the other settings make sense, but RTH is by far the safest.
Note that “continue” is not an option for “Lost Signal”. Instead, these are the options: Hover, Land, RTH.
Edit: My comment about “continue” not being an option for “Lost Signal” is referring to DJI’s Safety Settings where the options for a lost signal are RTH, Descend, or Hover. Whereas the options for a lost signal during a waypoint flight are RTH, Hover, Land or Continue, where “Continue” is not available in the EU.
Ok. With that information I can provide more direct answers.
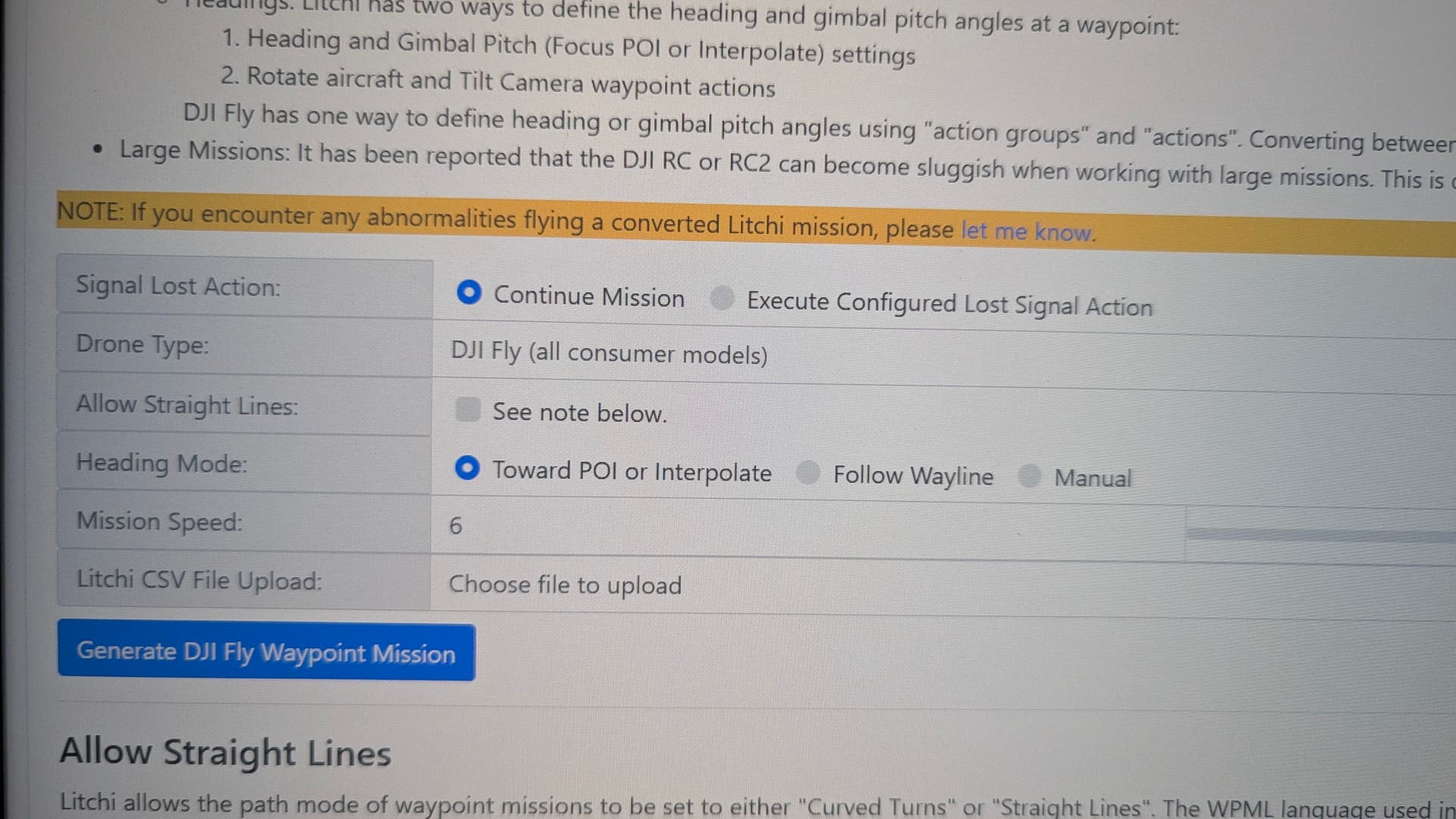
That option is what DJI calls the “exitOnRCLost” setting. DJI’s possible values are: goContinueexecuteLostAction: Exit the waylines mode and execute a runaway action.
The “better” setting depends. With careful planning, there is usually no problem using the “continue mission” setting. That is what I use. DJI’s “signal lost action” can be set to one of the following: RTH, Land, Hover, or Continue. Of those choices both “Hover” and “Land” are the most risky. If the conditions allow, you can use those but they are generally not good default settings.
Your original post said that during waypoint missions you are experiencing signal loss that results in your drone executing RTH. I don’t have a Mini 4 Pro but my understanding is that it should be able to continue a waypoint mission after signal loss if you are in the USA.
Yes, but I did have 4 successful long difficult involved missions prior to the return to home issue. With the successful missions I was hitting cancel every time it wanted to return home. But this time I wanted to see if that pop up message had any merit if I didn’t touch it. I BELIEVE that is what sent it home. I just assumed the “continue” setting would override anything else.
There is one more RTH setting in the RC 2 controller’s settings I think under Safety. I believe I have that set to RTH on signal loss. Which seems like a good idea to have SOMETHING set to RTH if there is an issue. I have no idea how, but that drone climbed 800’ over a steep mountain from a 65’ elevation down in a gorge. Came right back to me twice in a row. Which is awesome. I don’t want to turn that off but maybe I need to.
I think the Mini 4 Pro has the standard RTH function where it climbs to the RTH height then flies home. You must have had your RTH height set to 800’. If not, the Mini 4 Pro is using its built-in obstacle avoidance during RTH to avoid running into things. I have not tried RTH where the drone would be required to fly around or over something so I have no first-hand knowledge of the reliability of such a situation.