My drone started to descend early when returning from a flight.
What i expected the drone to do is to rth to the homepoint and then land. What it did is it started to descend on the way back (about halfway from the last waypoint).
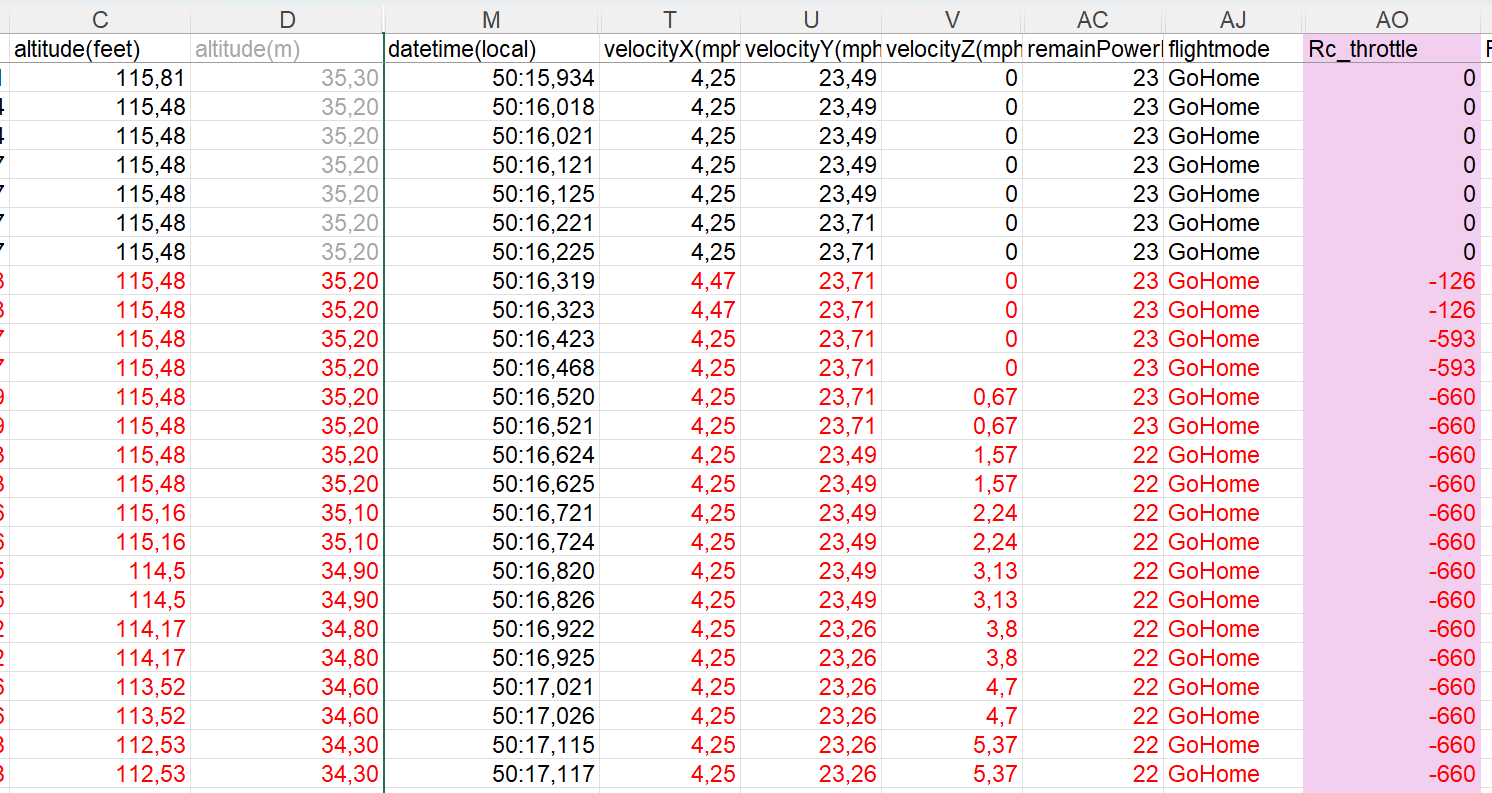
According to the flightlog it was in the “GoHome” (RTH) flightmode, when it started descending. I read in the logs that at that time, in the column Rc_throttle, the value starts to go from 0 to -660 and it stays at -660.
Can anyone tell me why it started descending early or what the Rc_throttle column means?
Thanks a lot!
Do you know what the Rc_throttle column column is doing? I have a feeling that the descent of the drone might be connected to this “Signal” it is getting. Since according to the flight log, the drone starts descending at the same time as the value changes in the log.
Thanks for the info about rth being governed by dji fly. I will consult the manual about the RTH settings.
The way i see it is that first it gets this signal(?) and then it starts descending. But maybe i am interpreting it wrong. Therefore the question: Does anyone know what the rc_throttle column signifies, and what (and when) is written there?
Yes, i gathered that the log just logs the data and does not interfere. But i was hoping that it also stores what information was sent to the drone (or issued to it from the fllightplan?) as well as sensordata.
RC_Throttle is the amount of throttle (left stick up/down in Mode 2) sent to the drone and varies between +999 and -999.
It takes a few milliseconds for the drone to react.
It also takes a few milliseconds to record the drone behaviour in the log file (altitude & velocityZ)
50:16,319 Descent command (Rc_throttle)
50:16,520 velocityZ from 0 to 0,67 > 0,201s delay
50:16,721 Descending (altitude) > 0,402s delay
Ah, sorry i didn’t state what drone i am using. Its the mini2, so a vsc-controlled drone. I will test if i can change altitude in RTH with stick inputs.
The RTH that was initiated is the “normal” - mission is finished RTH. Or does “flystate” 15 help?
What could lead to vsc- input after the drone finished the waypoint mission? Why does it not stick to the rth-elevation that is set in dji Fly?