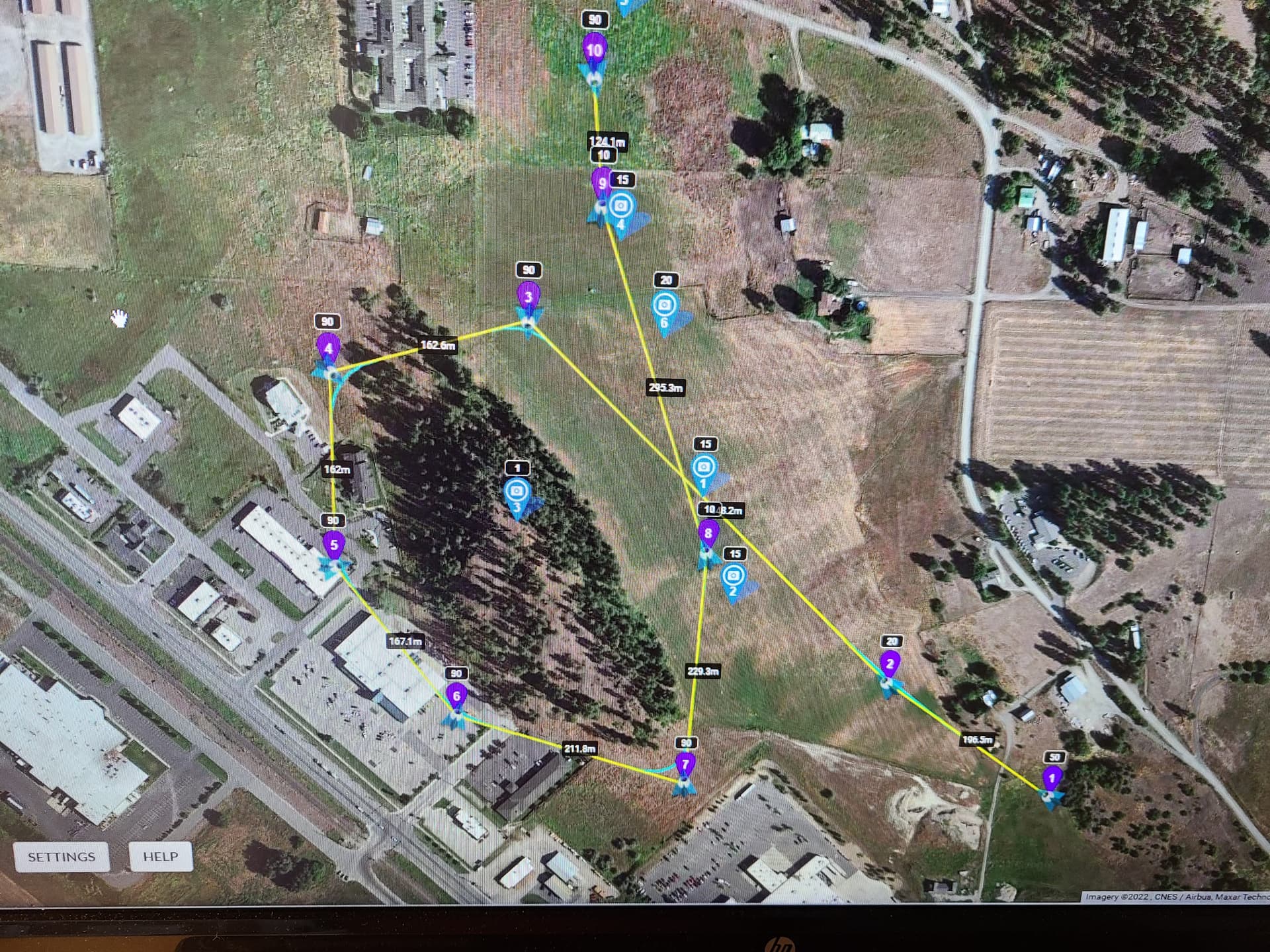
Mission: Circle a small hill in the middle of the valley
POV: Top and center of the hill
Landscape: Covered in Pine Trees
Waypoints: 6 used taking the drone around the small hill (350’ elevation over the valley floor)
Instructions: WP1: Turn on video, go to WP2, etc
Camera was instructed to watch POV as it circled the hill
As the mission began, everything worked great. But when the drone hit the far end of the hill (WP4), the camera dropped to face the ground. Stuttered up and down a bit, and then came back up to the top of the hill, but in a different spot.
The problem made me think the camera is looking for a particular object as the POV, but then thought, it must be a lat/long position with the height set by me.
Could someone tell me what the issue might be or what I need to know about setting POV’s?
The camera is not looking for an object.
The direction of the camera calculates litchi according to the parameters that you set on the map.
Poi 3 height 1m
Thank you, but that isn’t what I programmed it to do. After circling the hill, I had it look at the valley floor as programmed. It is point 4 where I had the problem.
I’m laughing… Your next question. Why do I need the other 40 points… Because I’m a beginner and am learning. Yes, I will get this figured out, but just need to know why I’m having a problem at point 4.
I do think you answered my question though. Are you saying I should have set the height of the POI to the actual hill height? I guess I didn’t think I would have to do that. Somehow, I thought the Mission would know the height of the hill. What is throwing me now is that the mission worked fine except for point 4.
I believe your mistake is that you set the altitude to 90m and launched the drone too low. If you climbed a hill and launched a drone from there, you would have a height of 90m and the drone would not crash into the hill.
The drone didn’t crash into the hill. The camera decided the POV on point 4 was at the ground below it. The camera went down, up half way, down, and back up to the top of the hill. Clearly I don’t know why it centered itself at the top of the hill but in a different location from where I set POV 1.
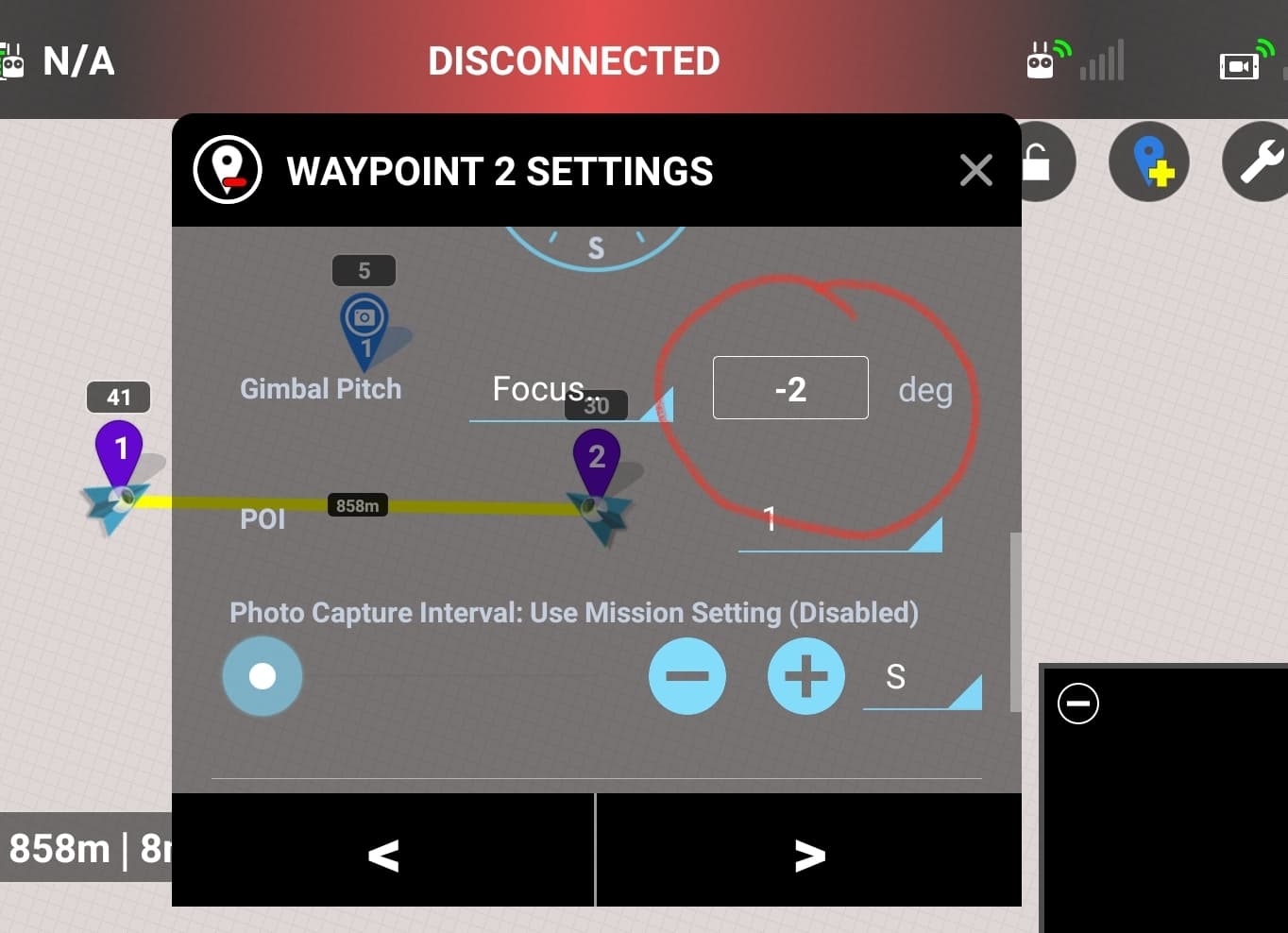
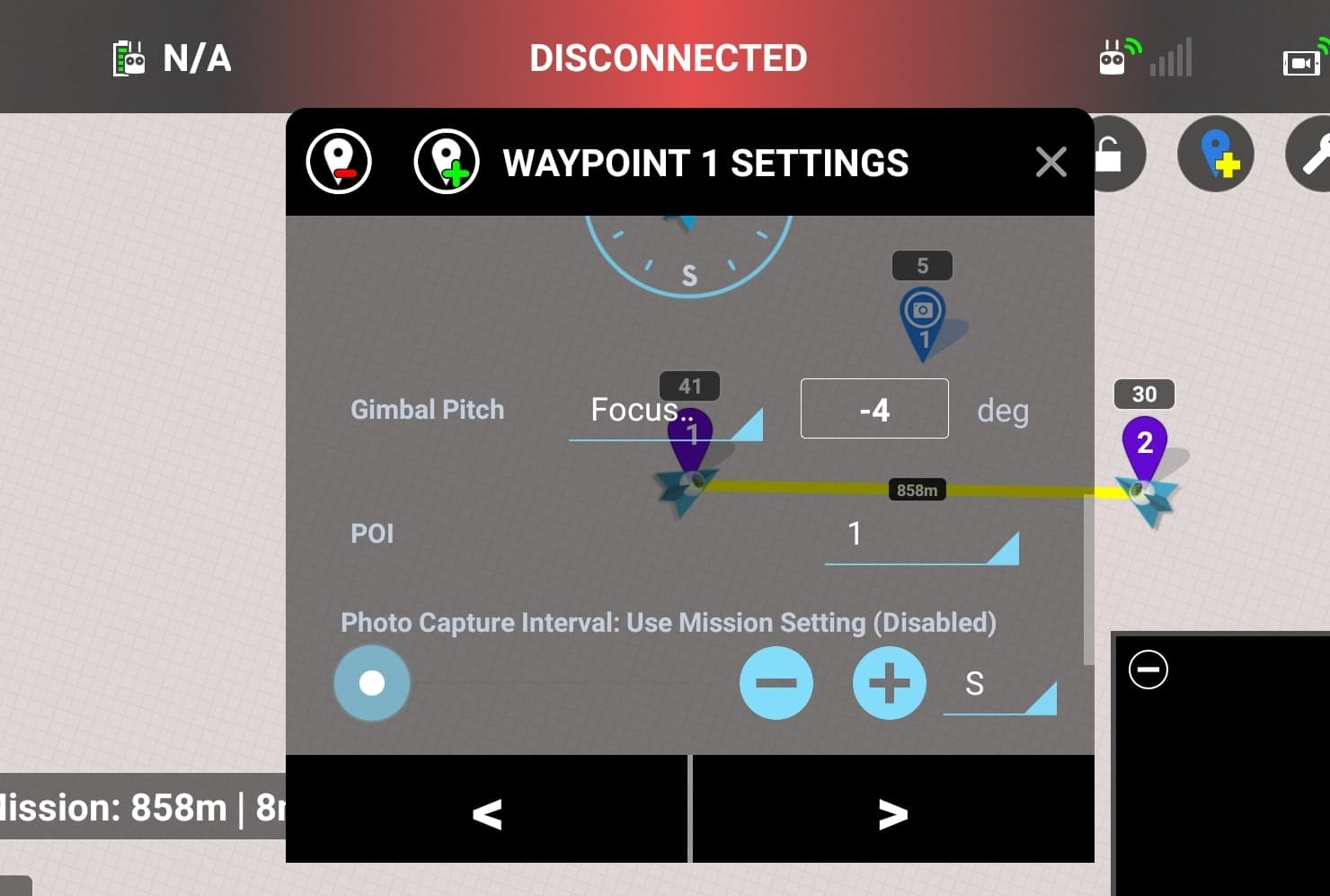
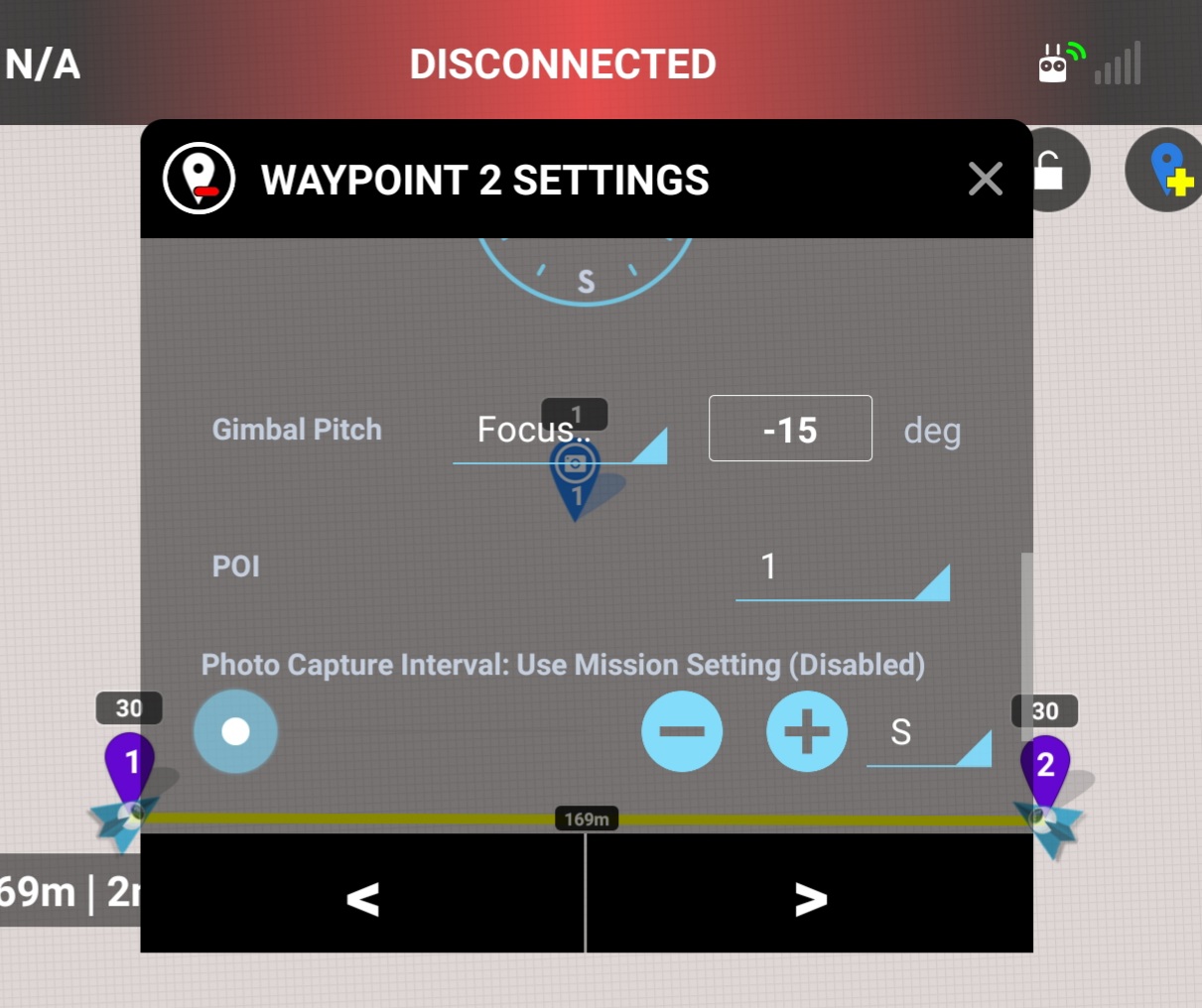
However, the poi height of 1m is too small, in the wp settings you can see the angle of the camera, and it will be very tilted down.
If you wanted to see the tops of the trees, then you need to set approximately this height
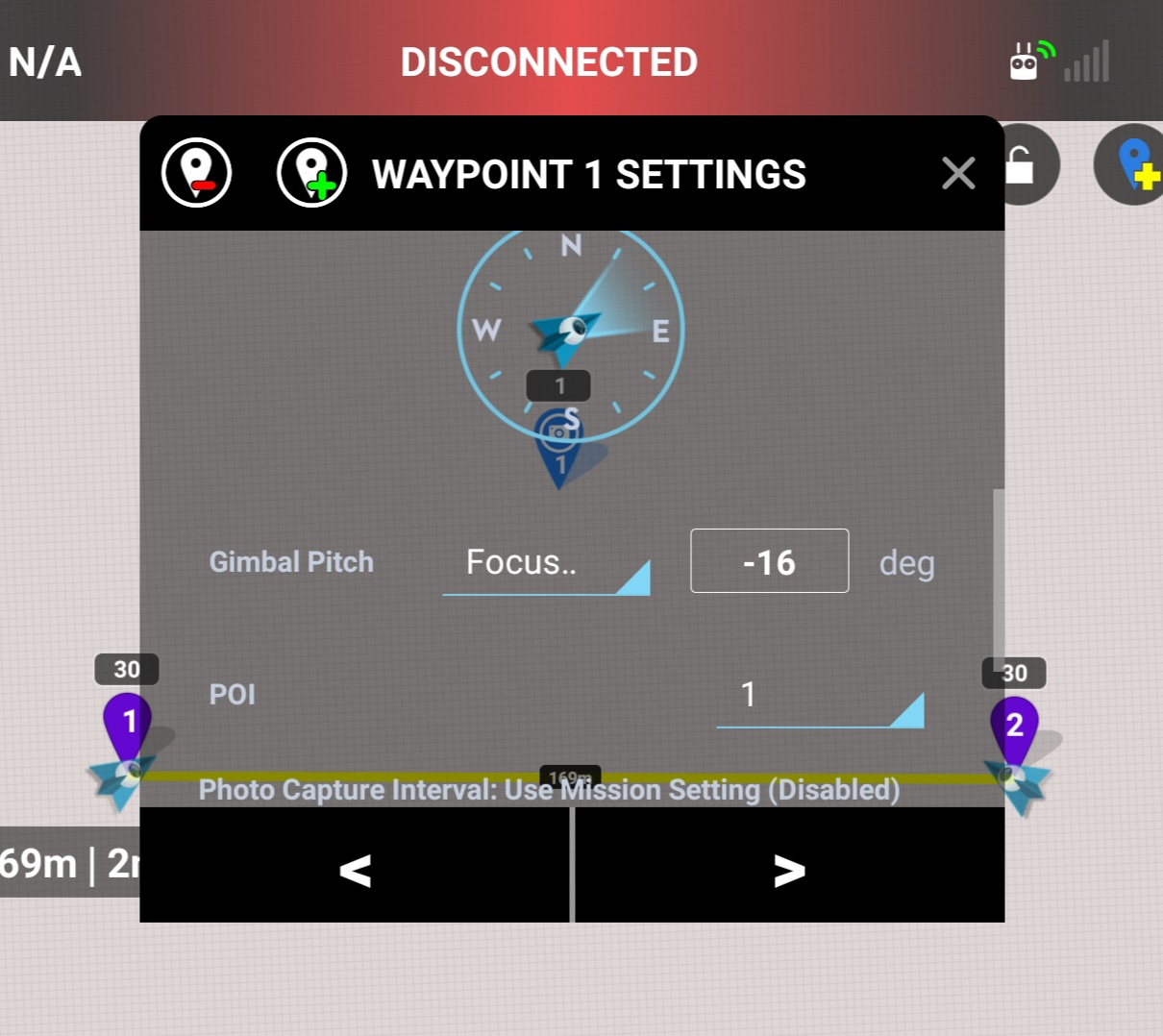
Unfortunately litchi is often mistaken, when wp1 and wp2 heights are the same, litchi sets the angle with a different value, in these cases you need to manually correct the set angle so that the camera does not tilt during the mission
In your example, the POI is closer to WP1 than it is to WP2. Therefore, the gimbal pitch angle will have a larger negative value at WP1. This is basic trigonometry.
-There’s NO proof the 3 points in your screenshot form an true equilateral triangle.
The actual angels at both points are something like:
-at point 1: -15.5001 deg.
-at point 2: -15.4999 deg.
They are rounded to the nearest full degree.