Hi Everyone,
I’ve tried to read the forum to check for previous answers posted but I still have a couple of issues.
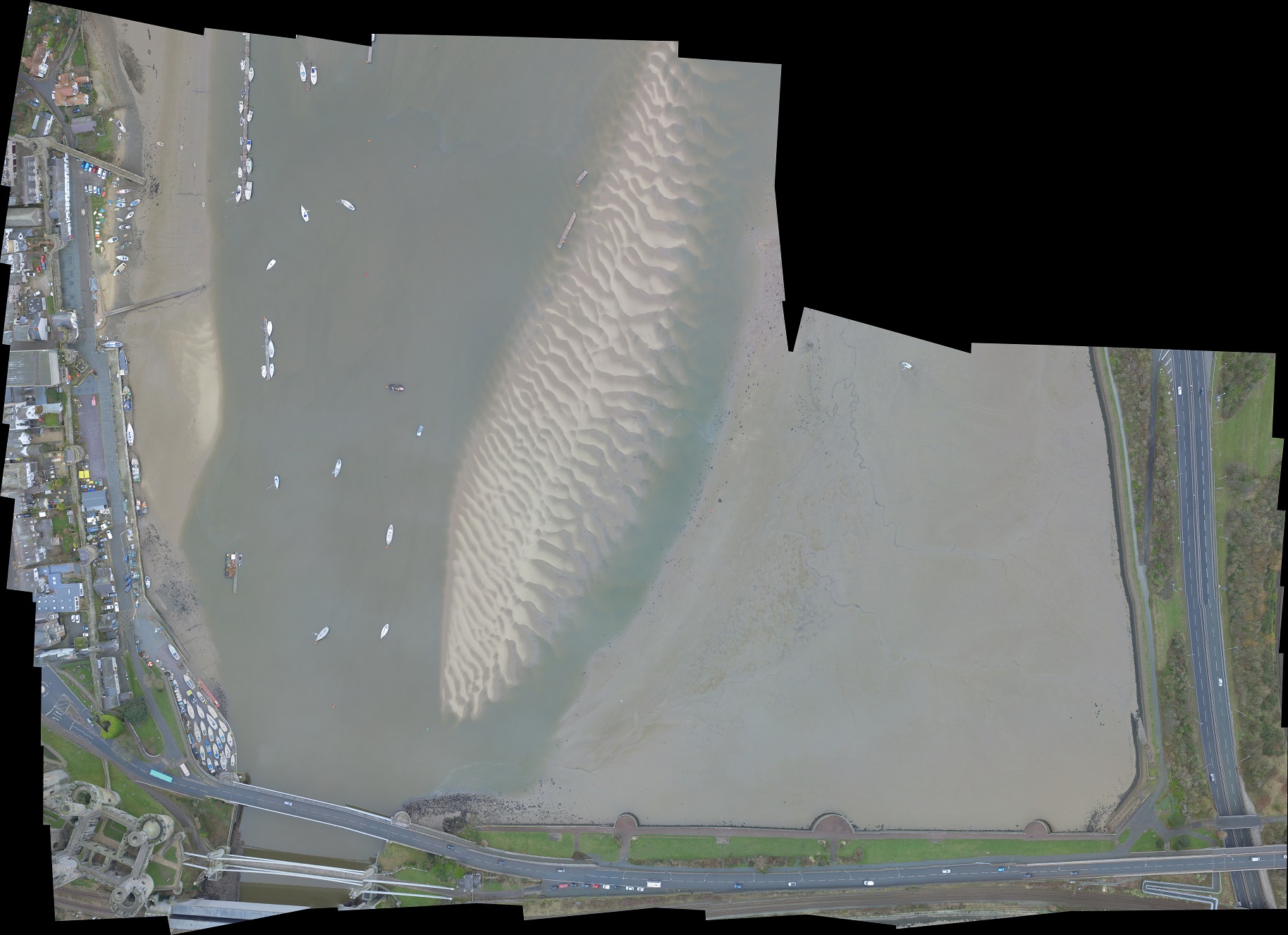
I want to create a simple aerial map of our river at low tide showing the sandbanks.
I am flying a Phantom 3 pro. I’ve used ancient.land Grid Mission Designer to make a gird, imported to Litchi, then stitched the images together with Microsoft Image Composite Editor (ICE).
This has worked reasonably well in a few test flights but still not getting a good final image.
Some issues with the ICE. It seems ICE has to have a rectangle with the same number of images on each column.
Also, despite this being essentially orthographic it seems to try to impose one or other projections when stitching the images together. This is leading to straight lines on the ground (like paths) coming out jagged.
Initially, I set the Zcheck to 1 which allowed me to control the number of images on each column. This means the drone stops and hovers at each waypoint. Takes longer, uses battery etc. Also, possibly having to hover in the wind aloft (120m AGL) means the drone is not level and the image is skewed.
If I increase Zcheck it reduces the number of waypoints (down to just the ends of the rows). Now I assume it has to rely on taking images between the waypoints. Perhaps the drone will be more level. It is still showing waypoint actions though and I note that the Take Photo action now has a parameter set to 12.0. I don’t understand what that means.
I’d be grateful for advice.
Am I missing a trick with ICE?
If not, is there an alternative, ideally free like MS ICE?
Is it better to have Z-check at 1 or 11?
Would it be better to fly lower to reduce the wind speed the drone has to cope with?
Many thanks
Michael
It might be better to INCREASE altitude. These are wide angle cameras so, if too low, tall things like trees and buildings are seen from much different perspectives when flying 2 different paths. They are difficult to stitch like that.
Consider that satellites take their pictures from much higher…and they are much more top-down.
Taking more pictures with more overlap and then cropping them to the central portion (which is more “straight below”) while still overlapping enough might help per the perspective problem mentioned.
and, flying slower is not a bad thing especially when taking more pictures. AutopanoGiga is still “out there” for free I think and allows more flexibility when things don’t go right.
Thanks to @Sam_G and @gorm for your help. I have tried increasing Z-check to design a flight plan based on photo interval instead of using the waypoint actions but this didn’t go well: I only got images taken at the waypoints at the end of each run. This was despite changing the mission settings in Litchi.
I have also tried WebODM but this coped worse than MS ICE with the compositing: WebODM ignored 90% of the images. This maybe because I had set the overlap to 60% and I see WebODM wants 75% at least. Also, the river is fairly featureless in some of the images.
I think it may be more efficient to fly fast between waypoiints and use the waypoint actions rather than use the photo interval because I think I’ll need to reduce the air speed which means the whole flight plan takes longer overall.
I am flying at max legal altitude for a hobbyist so don’t want to take it any higher. The RAF round here like to fly low over the river too so I need to keep things safe,
I can’t find a user manual for GMD and it’s only by going through different posts on this forum that I have pieced together how to use it. Its a very good tool but @james1 seems to have stopped posting and the GMD seems slightly unfinished.
Michael
Overlap of 60% will not produce a desirable result.
Bodies of water dont fare well, either. As you said… not enough features.
If you would like to share your mission, users here will be glad to look at it and make suggestions.
I have increased the side and front lap to 70%
For the Photo Capture Interval version (Z=max) I have reduced the flight speed to 5 m/s
For the Waypoint Action Photo version I have added a 1 sec hover to each waypoint (as suggested by a previous post).
The Google earth image is at high tide and many of the images would just be water but at low tide with the banks exposed there will be more features to register.
Thank you for your help and interest.
Michael
At 11.2 mph (5 m/s) and photo interval of 9.4 secs, you’re traveling 154 ft between images which is your 70% overlap. Still quite low for a good orthomosaic.
You lose nothing (timewise) by taking photos more often. It gives more images to feed into the software.
If you capture images every 5 seconds, your Front overlap will jump to >83%.
I prefer to use waypoints only at the end of flight coridors (if terrain permits). Then its easier to change photo capture interval or flight speed without a TON of mid-waypoints to change. I like your Z=max mission better.
I have a Phantom 3 Standard. I have found that it does not take interval photos where my other drones do. You have a Phantom 3 Pro so it may be similar. So, whenever mapping using my Phantom 3 Standard, I have to set Zcheck=1.
I use Autopano Giga. It has a feature where one can manually identify similar areas of multiple photos to aid in stitching. It also allows for various projections.
If, by “level”, you mean that the heading changes slightly from its flight path, the stitching program should be able to adjust for this.
The height of your mission should depend on what GSD you desire (the lower the better) and what features are in the view of the camera. If an image contains nothing but water, chances are that it will be un-stitchable. Tall trees also introduce some difficulty unless the drone is sufficiently high. A grid mission flown at 120m seems pretty high unless you are doing that because of tall trees or large areas of water (both for stitching purposes).
Thanks @wesbarris and @Sam_G
Yes, the Z=max plan did not go too well. I also think it is something do do with the drone not taking interval photos. I now understand that GMD does not import either the mission settings or the camera settings. It seems possible to set interval photo capture in all three places: 1. the waypoint setting (which is in GMD); 2. the mission settings which can be set on the Mission Hub on the web app and on the app on my iPhone and 3. the camera settings which can only be set on the app on the iPhone. However, even when all these are set to photo capture the flight plan still only takes one image and the end of each flight corridor at the waypoint. So unless I can figure out if I have done something wrong I think I have to go back to Zcheck = 1.
I encountered another small glitch on this test flight which I will record here in case it happens to anyone else.
Height management.
I note @wesbarris comment about flying as low as possible but I have also seen posts saying to fly as high as possible because this means fewer images (and therefore quicker flights especially if using Zcheck = 1).
For my purposes a high flight seems more suitable because I don’t need to make a very high definition map and flying high means that there will be more features in each image for registration during compositing.
So I set the altitude to 120m (max legal in UK)
One of the first times I tried a test flight the plan would not run because it said the altitude was too high. Then I noticed that the waypoints from GMD where actually as 121m (easy to do using the slider) and the aircraft had a max altitude setting of 120m. Easily fixed.
Today, I had a different error when trying to run the flight plan “aircraft is at too high altitude”. It took me a while to work out what had happened. I had turned on “Use online elevation” in Litchi web app so I could output a KML file to import into Google earth. Although the max aircraft altitude setting was 120m and I had reduced the Waypoint altitudes to 119m in GMD, the additional ground elevation pushed it over 120.
Ok, 120 meters it is then.
BUT -wow-that’s all over water isn’t it? That’s very difficult to stitch even with some boats moored…reflections, waves etc. I’d choose a smaller area to practise on in this difficult situation and ,yes, low tide with some more features will help. Too many pictures is just confusing until you get your tehnique settled and you might be able to stitch several smaller completions together.
I’m fond of Autopanogiga-wherein there is a workaround that CAN help unstitchables of water and sky: You can manually add the pictures that autopano won’t put in automatically and apply these from the “exif” of the photo. One at a time…using the exif noted
yaw (0-360),
camera gimbal pitch(-90 even if the exif has no value)
fov(to match the successfully stitched ones)
Not sure where this would be in webodm but I’d think somewhere…?
Many thanks to @Sam_G@gorm and @wesbarris for your help. The project is beginning to take shape now.
I think I have worked out how to do the interval photo capture method with z check = max on my Phantom 3. Basically I can set up the flight plan with GMD and Litchi, delete all the waypoint actions and then manually set the camera settings in the Litchi app when I come to fly (Camera settings - Photo settings - Capture mode - interval - 10s).
Then once the flight plan has started I manually start the interval photo capture which will continue to acquire images until I manually stop it. It seems that 10 seconds is the highest frequency that is allowed by the Phantom 3 firmware. This means that to get an image every 174ft I have to reduce the airspeed to less than 4.7m/s. The estimated flight time is a little longer but in practice it may be quicker I suspect.
I think curved turns with curve = 0 may be better than straight lines.
Compositing:
WebODM did a pretty good job with the images I took this morning with the Z=1 plan but still is ignoring a lot of images - strangely the ones with the most detail in along the quayside. ICE also did a good job but it is more of a hassle as I have to divide the whole area up into multiple sections and then try to stitch composite images together - which WebODM does automatically if it accepts an image.
However, so far Autopanogiga is the best at the compositing.
I did a test flight today with Z-check=max and manually started the interval photo capture. It worked ok and collected images throughout the flight plan but I am not that happy with this method. Due to the limitation of the drone to only collect an image every 10s the flight had to be very slow. I think Z-check = 1 and a faster transit between waypoints may be the best for me.