I just set up a trial mission to fly up and down my driveway and when I watch it run in GEP, it looks fine until the drone passes waypoint 2 on it’s way to waypoint 4 then it starts bouncing up and down. When it reaches waypoint 4 and turns to go to waypoint 5 (the last waypoint), the bouncing stops. Is there a reason for this? Thanks!
Here is the mission link: Mission Hub - Litchi
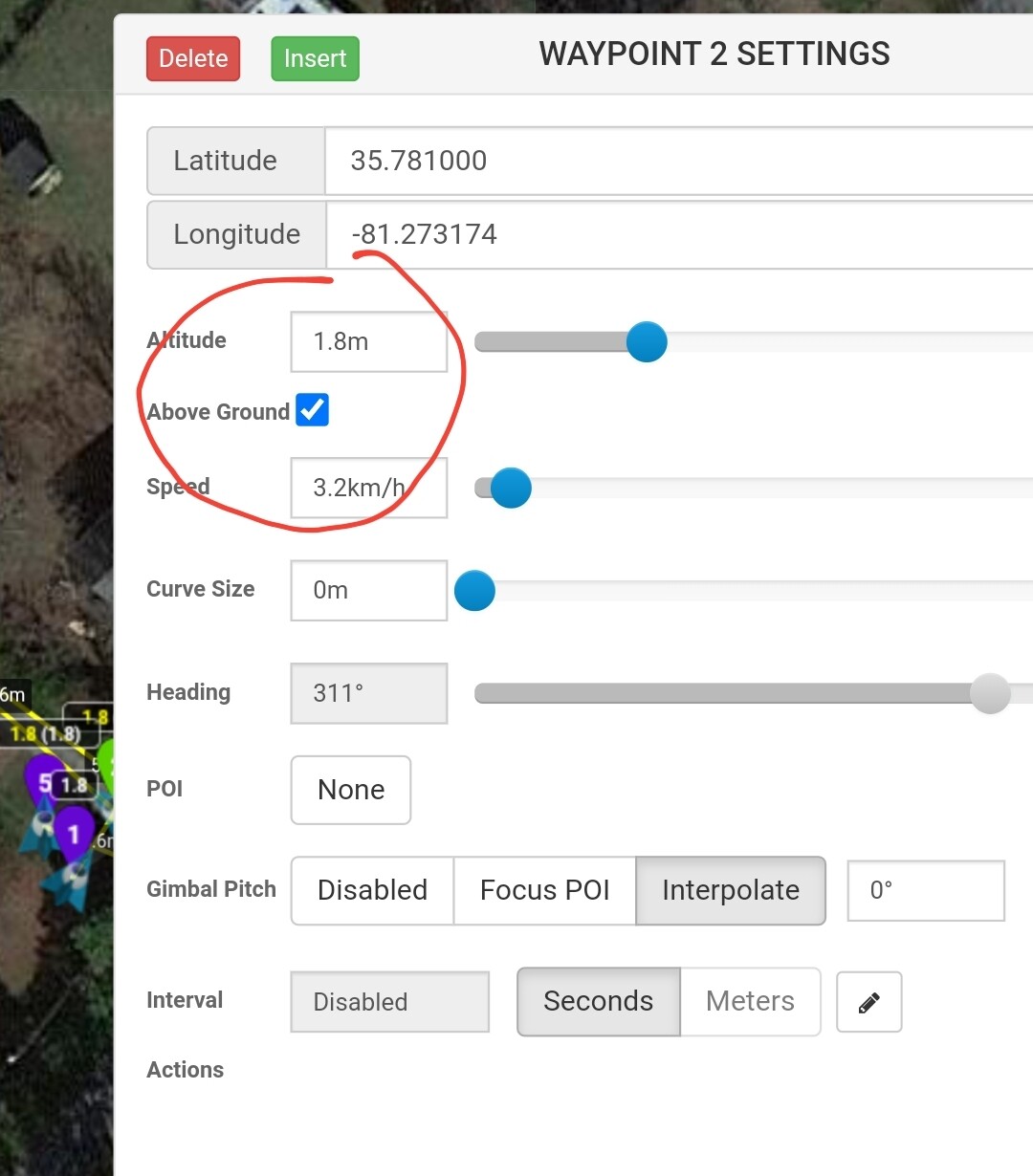
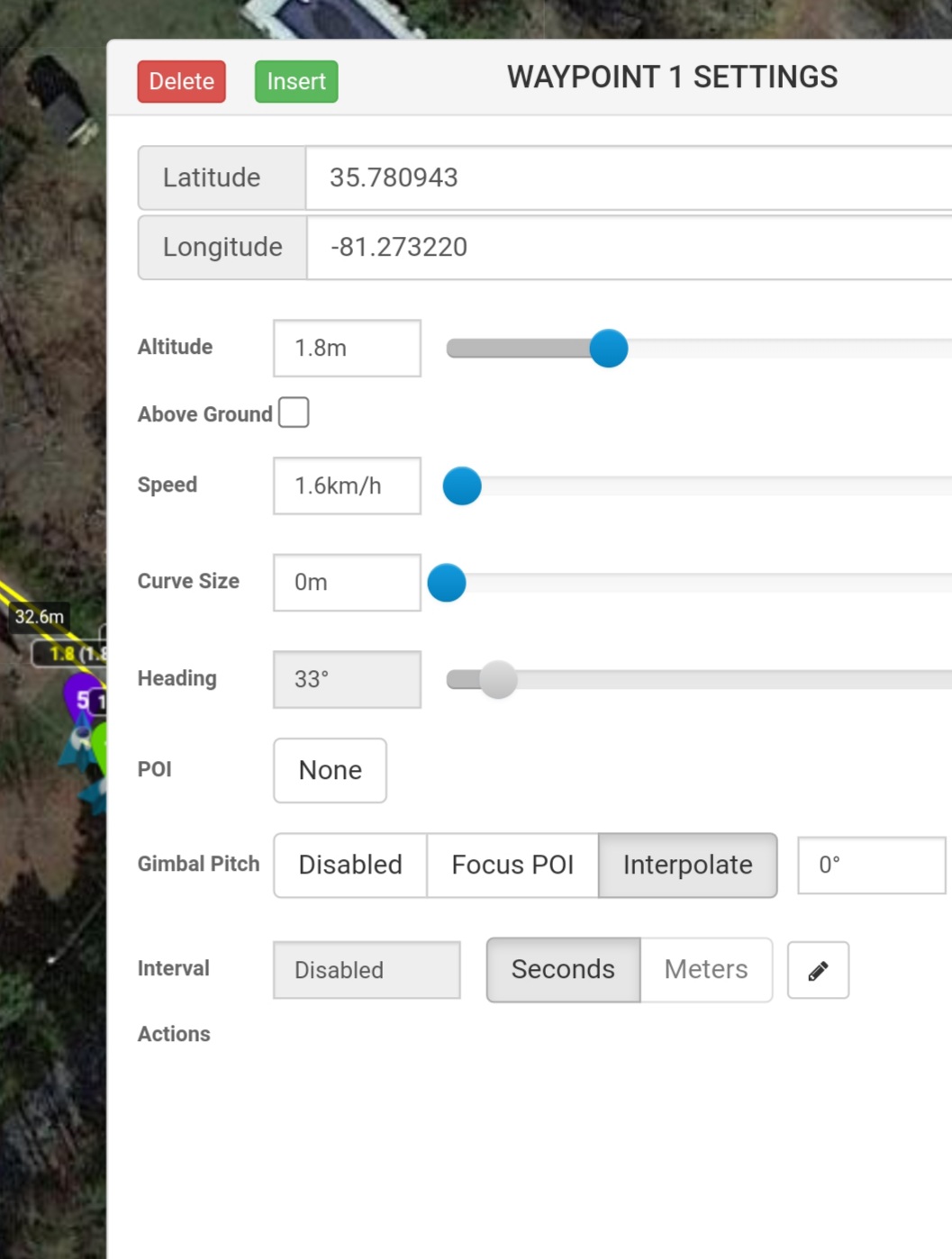
This is because your flight is too close to the ground. Any time your flight path gets close to, or goes under ground, Google Earth will show that bouncing behavior.
My recommendations are:
- Plan a mission that is higher and further away from trees and obstructions.
- Don’t bother checking the “Above Ground” option unless you are in an area that includes a wider range of elevations. The area in your mission is relatively flat so you do not need to use that “above ground” option.
1 Like
Thanks Wes and paxxa for that information. I set up this mission just for kicks and to be able to watch the performance happen in person so to speak. Now to go try it.