@bcmacman Check out this post by @wesbarris and read the bottom paragraph closely.
wesbarrisLeader
Yes, “Virtual Joystick” commands can be differentiated from “normal” flying by looking at the log files. If you view your flight logs using the “PhantomHelp” web site, you will see the “Flight Mode” column. This column displays the corresponding flight mode. Here is an example of one of my missions just before (and immediately after) I executed a waypoint mission using and Air 2s.
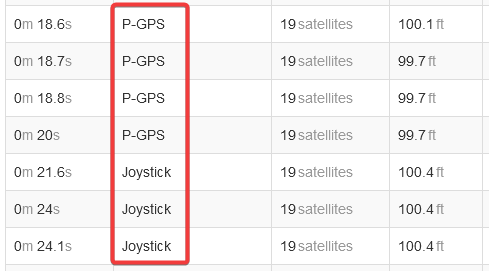
Notice that prior to the waypoint mission, the drone was in “P-GPS” mode – normal flying. Then, once the waypoint mission began, the drone was in “Joystick” mode – waypoint mission flying.
2