I’ve been reading about Litchi Missions and trying to see examples I realized most of them, if not all, are video missions in which the operator create a path and controls the direction of the camera and at the end they have a (nice) video.
I am looking for drone mission tool but for photos and not video. I basically want to create a mission to survey farmland and compile the photos into a master file - I understand Litchi does NOT compile the photos.
What I am trying to understand is whether Litchi is the correct app for my needs. It seems like it is mostly for video recording and not really for photos.
Could someone clarify if my understanding is accurate and if so, which app should I be looking into for the creation of photo maps?
I map out the whole property and change batteries after the drone passes a waypoint (ex: WP10). Then, I can re-start the mission (at a different waypoint number) after a battery change.
The mission settings can be altered (cruising speed, photo interval, altitude, etc) to change the photo overlap
This is exactly what I am looking to do. I had opened at least 20 public missions on the hub and they were all video related.
Do you have to setup the number of photos during the run OR the app automatically takes photos to cover the area covered? If you need to setup the photos points, how do you do it?
Are you happy with Litchi for the purpose of creating this maps? Or should I look into another solution that is more specific for this type of work?
The number of photos taken is related to the altitude of your and the overlap desired.
In Litchi, you can choose the photo interval based on time or distance (# of seconds between photos or distance between them).
I use a combination of this grid mission designer → https://ancient.land/
and Litchi.
AncientLand (to set some parameters and draw a polygon to map) can then export a CSV file which is imported into Litchi.
Like you said in your first post, Litchi does not process the captured images.
I understand the number of photos will depend on how high the drone is flying and the camera FOV. I don’t understand if this is something that users are actually calculating on the side or simply trying to guess. How do you do it?
If Litchi offers the mission creation tool, why are you using a external mission designer? What are the advantages of the AncientLand x Litchi?
What are you using to “stitch” the photos together?
I have some Litchi missions to reliably repeat flights to capture straight down shots (90°) over our quite rural gardens and horse paddocks. I then use Microsoft’s free I.C.E. application to stitch the images together. Microsoft stopped supporting this app, but this Download Crew site still has a free download: Image Composite Editor 2.0.3 (64-bit; 2013-01-13)
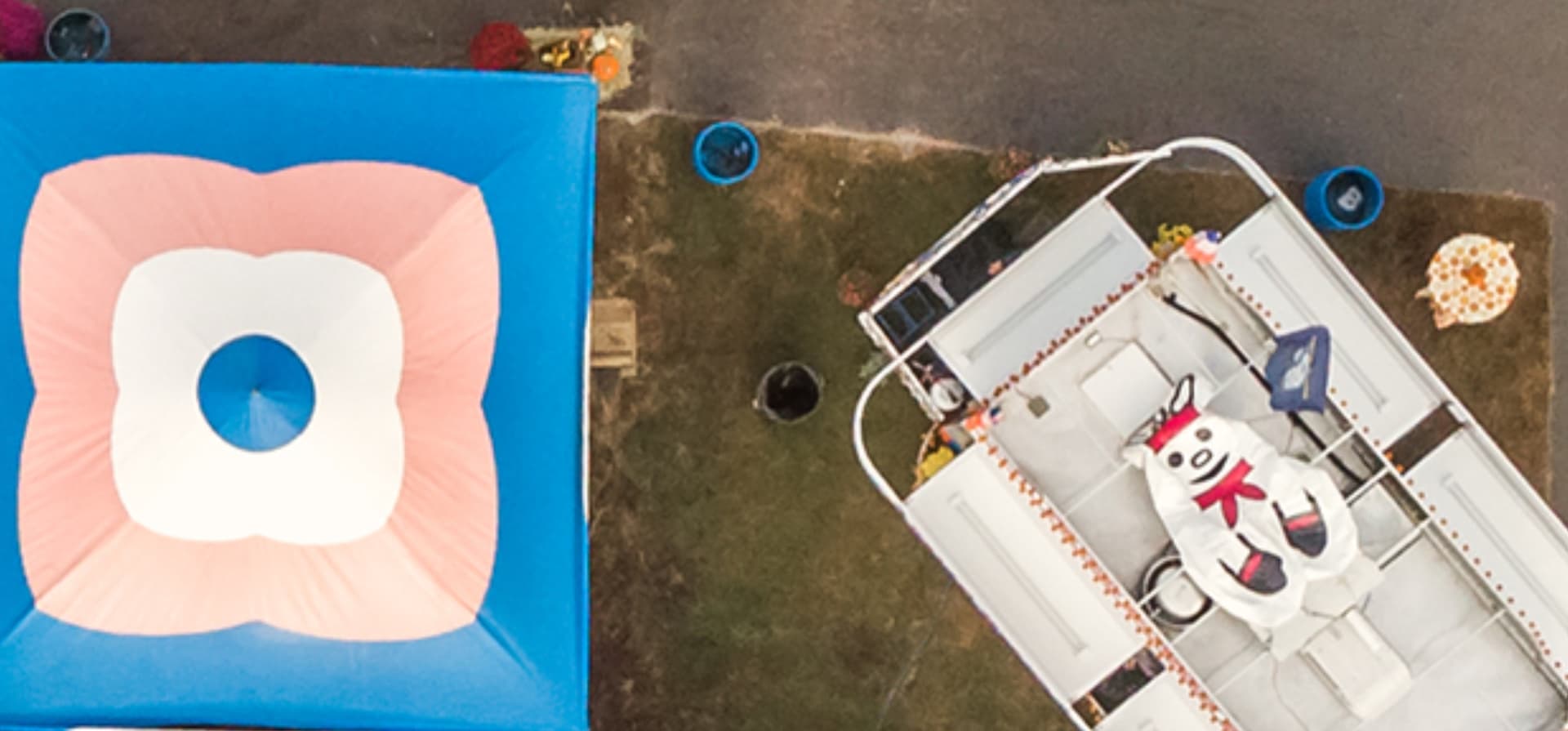
One series over our gardens takes 9 images 26.1m apart at the 90m altitude of the first picture (i.e. not above the ground at each point). When stitched, I discard the edges where there is some lens distortion, but the overlap for the images along the line of flight gives me a very accurate planar image. I can easily see individual plants.
I use them as overlay images in Google Earth. GE’s UI lets me place them very accurately, and the built-in measurement tools are quite adequate for my needs. With a stack of overlays taken in different seasons, I can click through them to see seasonal changes.
I calculate them…for distance interval; useable spacing minimum is roughly 0.7 X drone height for both columns and rows…ie: the track… DO also instruct Litchi to take supplemental pix at track corners so you will be sure to get corners.
also, It’s a convoluted exercise, but I can make maps useable in Osmand, offline and on a phone…here, superimposeed over a baselayer of Bing Maps…
More detailed than Bing or google, Ideally I can return to a stone, a reef, a lump of grass with a gps though I haven’t ever got more accurate than 15 feet…
The lens distorts. the gps position of the photos is “central” but also tilted per the drone’s attitude to wind…tip? It seems to help to crop the photos to square before stitching…the "0.7 " ratio works for this but it’s minimal -albeit quite workable- 33% overlap… increase it if wanted but since most stitching apps expect “panoramas” they will generally distort the map anyways even in their “ortho” or “planar” modes. The software to make better gps-capaple maps is going to probably cost money or a lot more work.
Most good mapping software will calculate this for you. If you want to do some manual experimenting, you can use this calculator to determine some of the parameters.
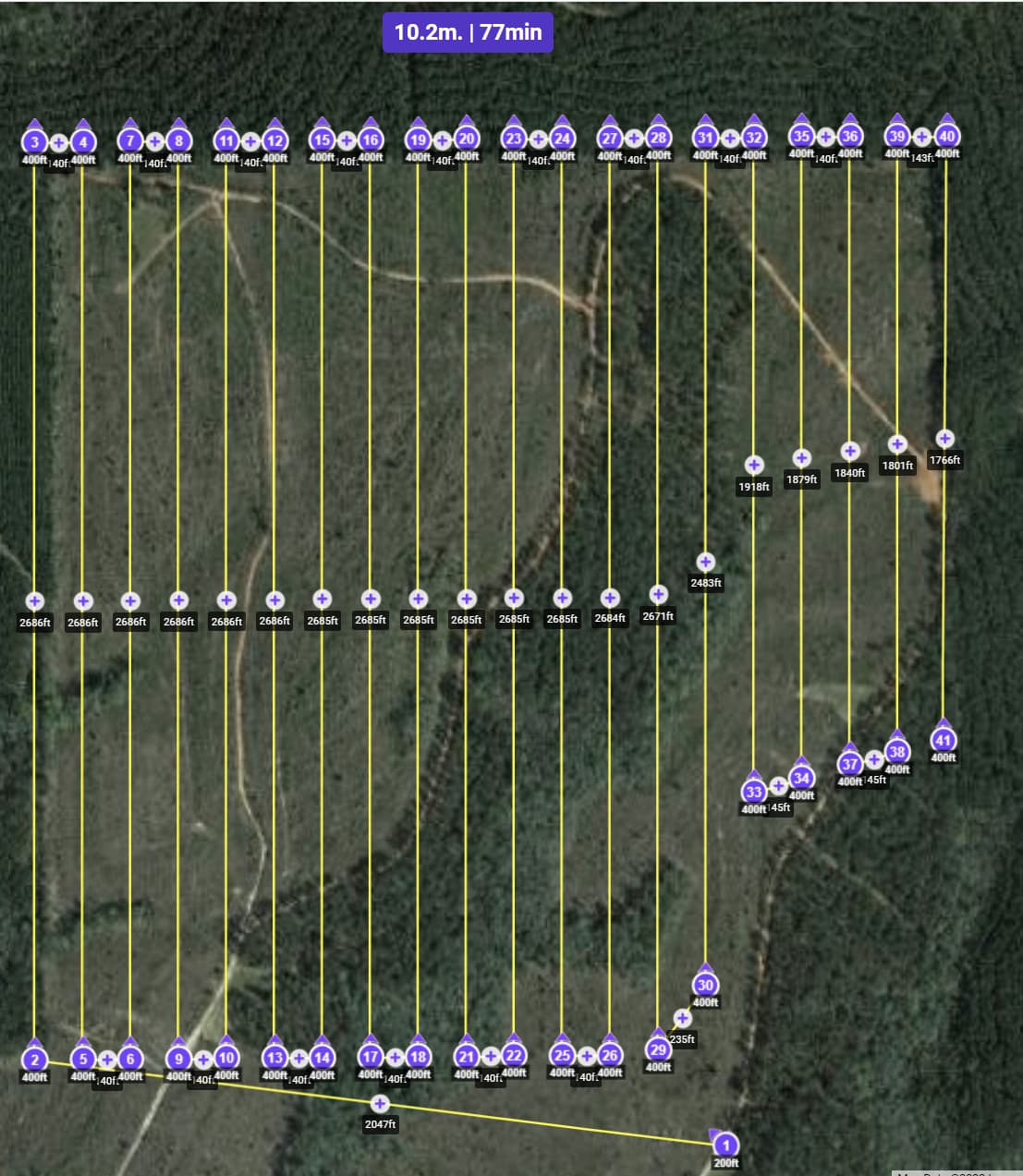
Just finished up a job using Litchi. Flew at 200 feet, at 22 miles an hour, 16.6 miles 61 minutes, always facing in the same exact heading, -90° on the gimbal. 75 feet between passes, set to take photos every 40 feet, shot 2,278 photos and stitched them all together using MICE (Microsoft ICE)
Sounds great! Pretty fast cruising speed. Was your drone able to capture images at that speed? Thats an image every 1.24 seconds.
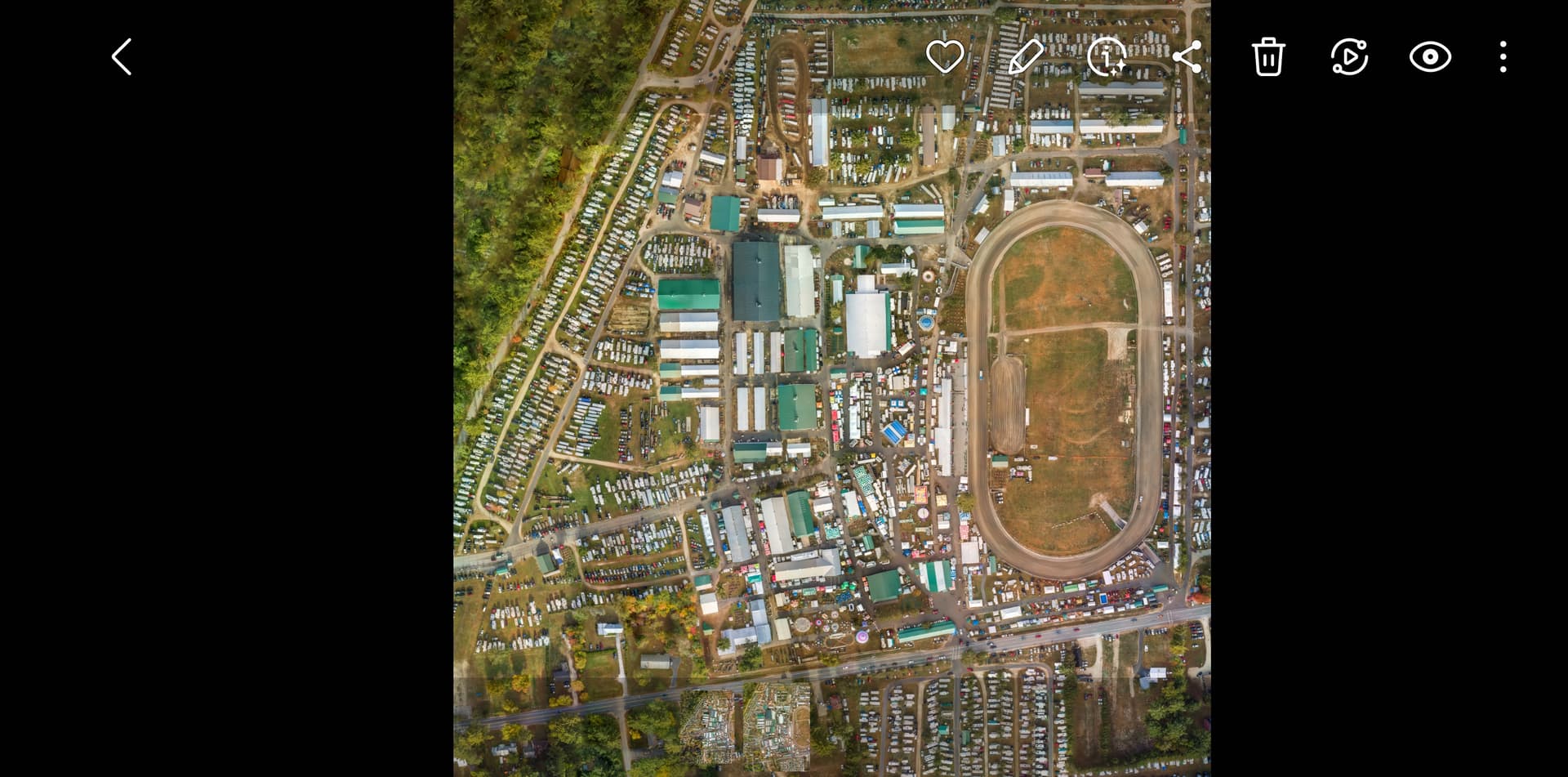
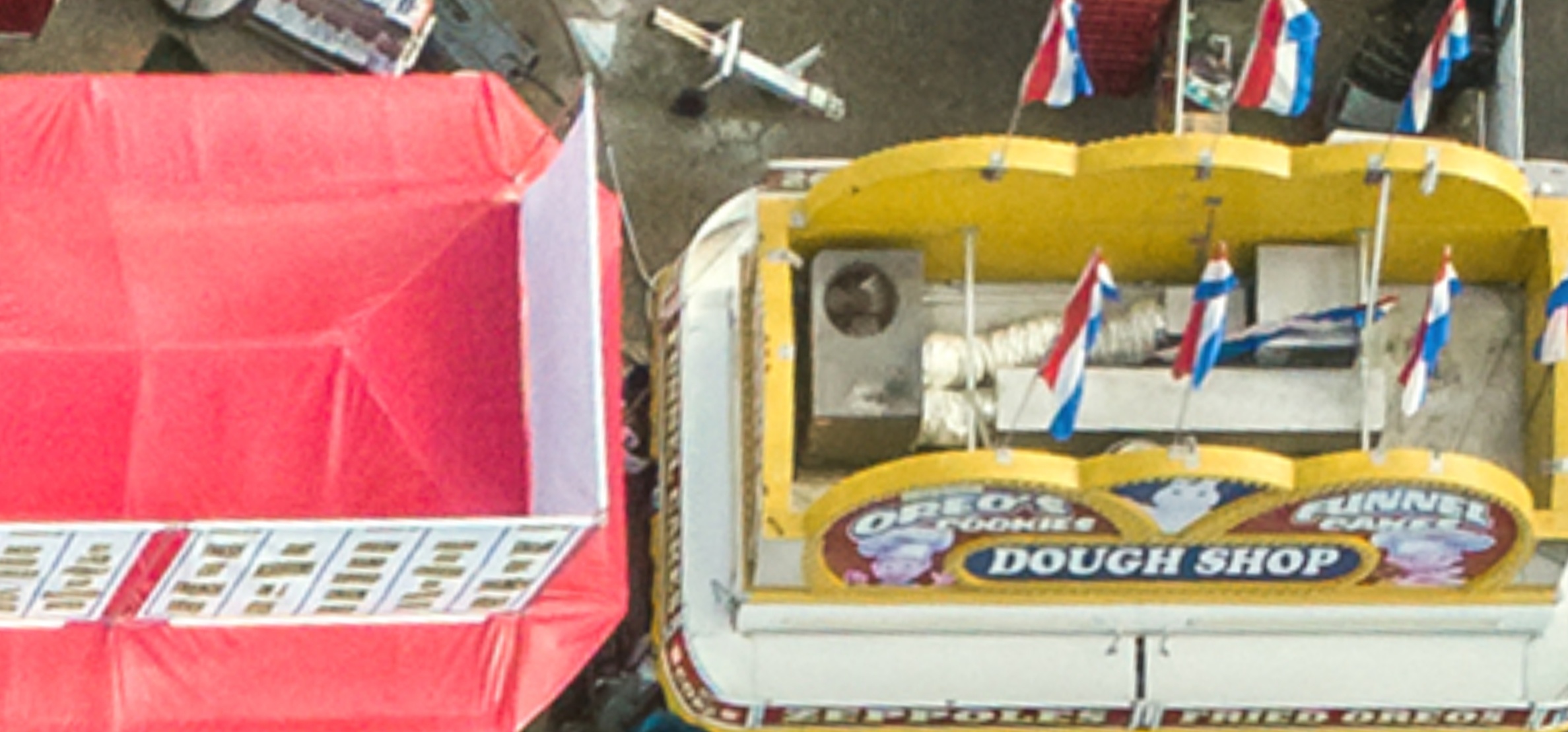
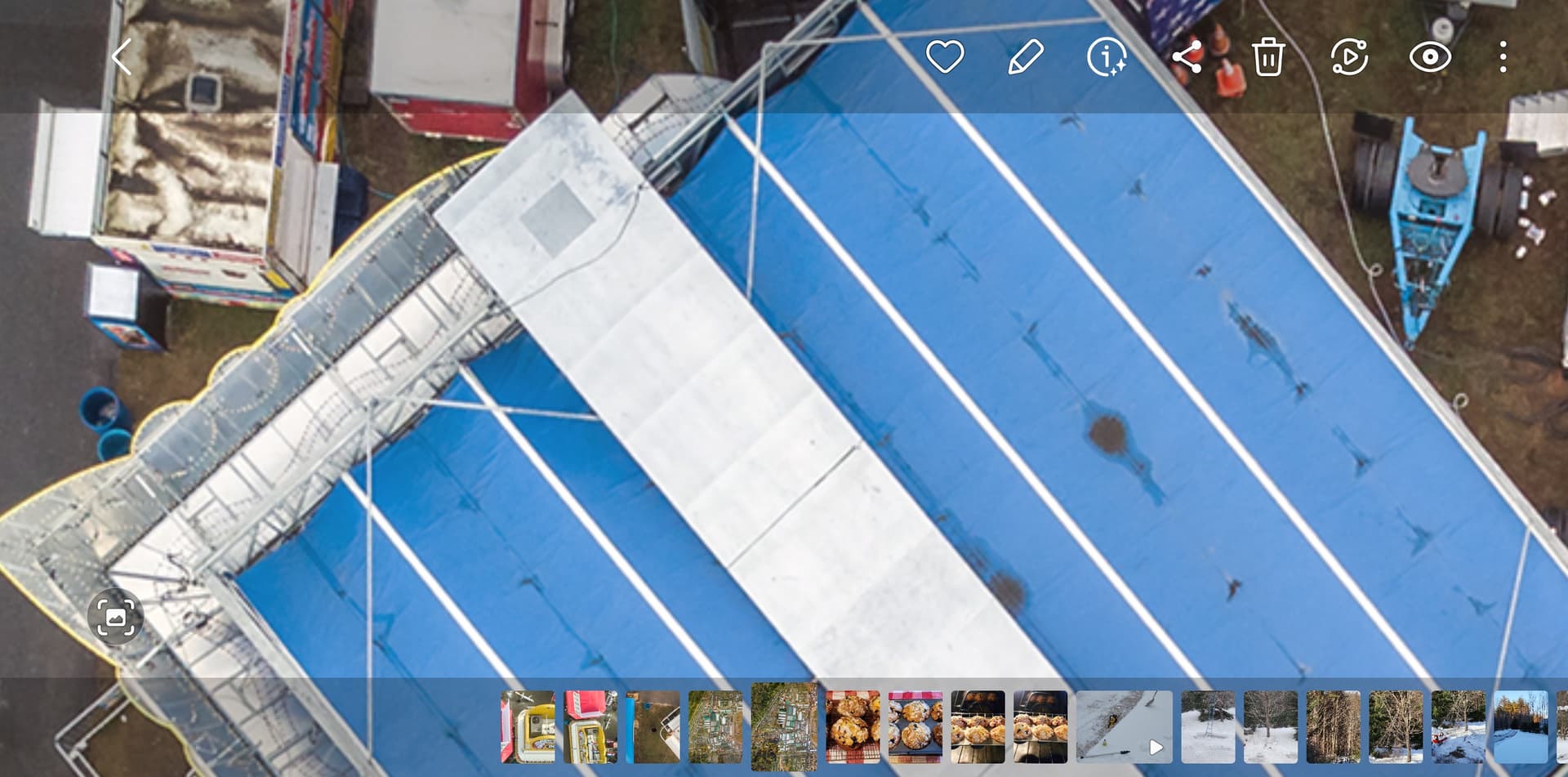
How did the final image look? We would enjoy seeing a screenshot if you are willing to share.
The camera had no problem keeping up with taking the photos and they were very precisely spaced out shooting at 640th of a second. It looks like the photo was taken from about 3,000 feet up even though it was taken from 200 ft. It seems to me that the critical thing when you’re setting up the mission is between the first and the second way point make sure that you choose Auto to next Waypoint and that will give you the precise heading, and then I just switch it to custom and do every heading on every Waypoint exactly the same. If you don’t do that it’s sawtooths when the pictures are trying to stitch together. I did a couple of screenshots zoomed in so you could see the level of detail. What do you think?
It looks great! I agree with you about keeping the same heading throughout the mission. It keeps all of the images oriented in the same direction.
Good job!
Hello @BBear ,
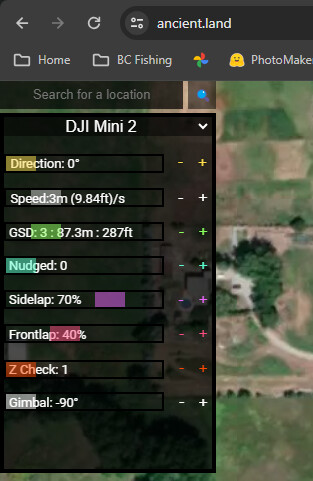
I would suggest you have a look at a website at this address ancient.land it will create a grid flight mission plan that can be imported into FlyLitchi.
The user specifies wich aircraft, flight altitude, desired Ground Sample Distance, flight azimuth, start point, photo overlap% - forwrd and sidelap and gimbal angle -90 to 0 degrees.
Here is a link to the resulting CSV file: Lodge Rd MIssion-58m P4Pro.csv - Google Drive Lodge Rd MIssion-58m P4Pro
This area of interest was one of our local RC flying fields, now flying has been stopped due to regulations with Transport Canada and being in the flight path of CYLW (Kelowna International Airport) which is located to the South in Kelowna BC.
PS. I would also suggest having a look at WebODM for processing your captured images into orthophotos. Great Free Open Source Software with a great comunity of users and developers. The installer costs $57 if you are not great with linux, does support Win, Mac & Linux based PCs, process everything locally on your own PC with a subscription. Results are as good as the paid processing services IMHO.
I have had good results flying a Mavic 2 pro and Litchi to make a composite photo of a piece of land. From 360 feet altitude, set the interval for shots at 195 feet and gimbal angle -90 degrees. Lay out a lawn mowing pattern up and back on the land desired to capture. Put the pictures into PTGui and moments later you have a super-sharp photo. While I typically shoot Raw, for this I use JPG to keep the size of the resulting picture down. A nice feature of PTGui is that it recognizes that the pictures from one direction of travel can be matched to those shot while flying in the opposite direction. Once you have a Litchi pattern that works, you can modify it easily for other areas.