Hi there… did a search, but did not get a specific answer. If a waypoint location exceeds the range of the controller during a mission, it will disconnect, what is the default action of the aircraft in this situation, will it RTH? I read somewhere that the drone might either hover in place or land, neither of which are desirable. Thanks.
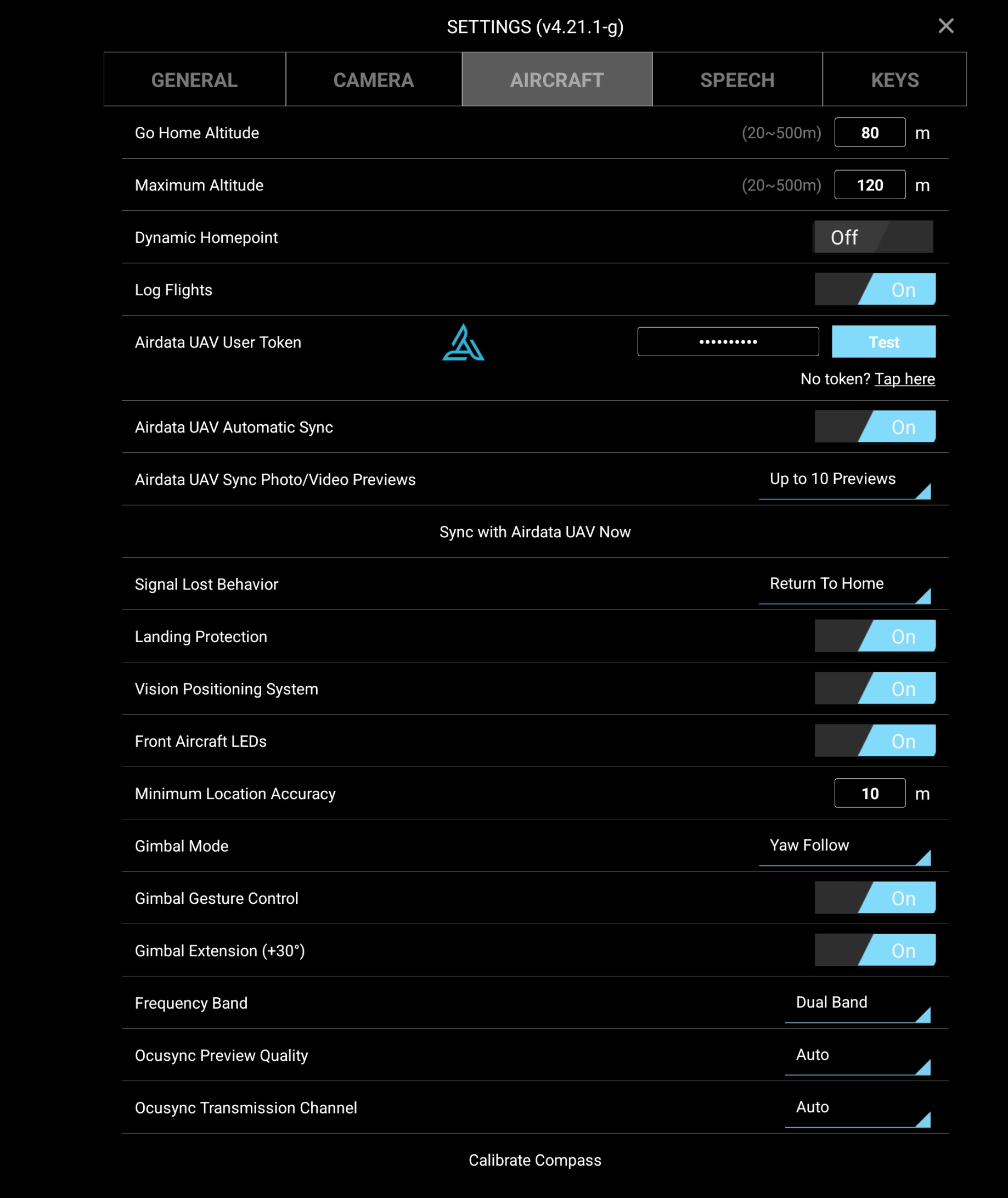
In Aircaft settings you can choose between: “Hover”, “Landing” & “Return to Home”.
Default is: “Return to Home”.
With my Mini2 I get this setting in menu only when connected to drone. As this setting is (along with G Home Altitude or Maximum altitude) stored directly into the drone. Because it needs to RTH/Hover/Land autonomously, without Litchi. Since they are in the drone, they are synchronized with DJI Fly App, so it does not matter in which app you set them.
Haven’t done the signal loss scenario though with Litchi though, only with DJI Fly. I’m really wondering how the drone reacts - will it stop before issuing RTH, or will it travel with last direction and velocity. When flying manually. You intuitively let go of the sticks on video feed loss (unless you’re flying behind something/towards you so you expect signal regain very soon). And that usually gets through because the uplink goes out much later.
But who knows what litchi is programmed to do just before losing the signal.
Once i get to some open spaces again and the weather permits I’ll at leas do a “Crashed App” test. Full speed between the waypoints I will just kill the app and see if the drone stops, or keeps flying. And if the later then if upon hitting the RC “pause button” I am able to gain control. Because during the mission the pause button only pauses it. You must “Stop” the mission on the screen to regain control.
The signal loss is a little tougher to simulate for test - when you want to observe the drone. I would need some concrete bunker to put the RC into.  Hopefully someone does this for me and posts on youtube.
Hopefully someone does this for me and posts on youtube. 
When signal is lost the drone will stop. Not by Litchi but simply because NO commands are received by the drone, like letting go of the sticks while manually flying.
When this interruption takes too long, the mission is aborted and the drone will either RTH, hover or land, according to your settings under “Aircraft”.
1 Like
Thanks everyone, I will have to fire up the drone to set the signal loss preference…
Cheers