Hi, I lost my Spark on a waypoint mission that I have flown multiple times before without any problems.
Only thing I changed this time, was to enable the option “Enable DJI’s Gimbal Interpolation in Waypoint mode”. This option allows you to adjust gimbal pitch and speed for waypoints when out of signal range. I did this mainly because i wanted the gimbal to move when out of signal range. But I also adjusted the speed for a few waypoints.
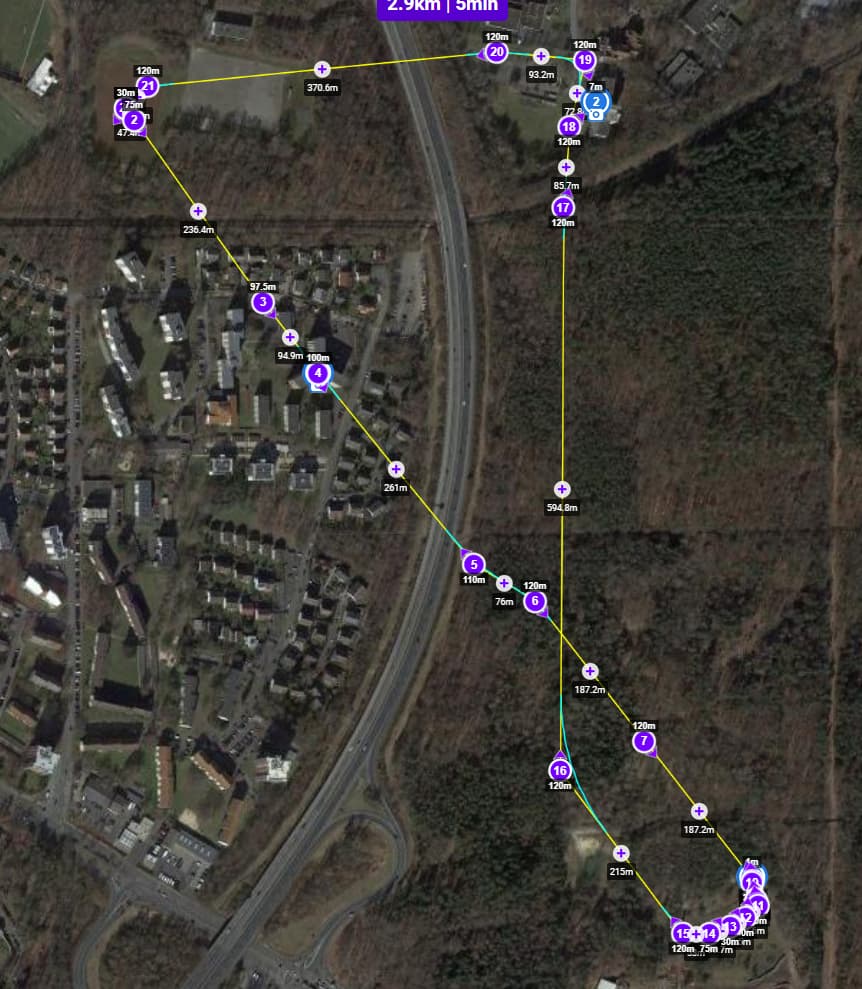
This is my fear now, because when I started the mission I got a warning about customized speed. The large part of the mission is set to max. speed. Only the waypoints 10-14 are set to speeds between 10 km/h and 30 km/h.
Since the large part of the mission is well above trees and structures with 100-120 meters height and flat terrain, I suspected the drone to have flown into a nearby tree between waypoint 10 and 11, because height there is set to only 30 meters. I have searched this area very well. Also the trees are not very high there, so I should have found it in case the GPS was a little inaccurate and crashed into the trees
Now my guess is, that the drone may have kept the low 10km/h speed from waypoint 10 and didn’t make it to the last waypoint until the battery died. According to the flight log I started with 94% battery life and had 85% when I lost connection after waypoint 3. Usually I had like 50% battery life left after completing the mission with a full battery.
Did you always fly from the same Home Point?
What was your Signal Lost Behavior set to? It didnt return home, obviously.
Your Uplink and Downlink signal strengths were both EXTREMELY low right from the start which would have indicated some kind of interference or drone/controller problem.
Did you lose signal on your previous successful missions?
Without more of a flightlog and since the mission didnt complete, it could have gone down anywhere after the point of signal loss.
The option to ‘Enable Gimbal Interpolation’ had no effect on the mission failure.
Since you had successful missions prior to this one, battery does not appear to be an issue, either.
If you had “Smart Return to Home” Enabled and Low Battery RTH kicked in somewhere between WP9 & WP13, all with an altitude of 30m, and your RTH altitude wasn’t set high enough, the drone could have hit a tree/obstacle anywhere on the path between those waypoints and the home point.
Yes, that should be set. But, I suspect it had problems before it reached that low battery point.
The signal strength is abnormally low, especially starting in an open field.
I had the Smart Return Home deactivated after I had some problems with the drone on longer missions with Smart Return Home kicking in even though the mission was planned thourougly regarding battery life
The signal strength is abnormally low, especially starting in an open field.
Maybe this is because I didn’t connect the controller with the mobile phone via cable. My thought was like: I am going to lose signal anyway so I didn’t care about it being better with cable.
Well the controller is brand new bought and I could only imagine it being the drone itself. The drone sat outdoors for over a year in the woods after I found it. I identified the former owner because he had plenty of footage from his garden. He didn’t want it back so I invested in a new GPS board + battery and it flew again. Not for long unfortunately. That’s how I ended up here
Signal strength has nothing to do with loosing the drone, the spark flies waypoint missions fully autonomously.
According to the specifications the Spark has:
-A maximum flighttime of 16 minutes (battery from 100% to 0%).
-A maximum speed in position mode of 8 m/s (28.8 km/h)
You started with 94%, Forced landing kicks in just below 10%.
16min/100% x (94-10) = 13.4 minutes until Forced landing.
Assuming an average speed of 28 km/h:
-I changed Cruising speed to 28 km/h.
-I changed all waypoints with a higher speed to Cruising speed.
-I changed all waypoints after WP10 to also 11.2 km/h.
This results in a total duration of the mission of 16 minutes.
At WP20 the total flight time is 12 minutes.
Conclusion:
The drone could have Forced landed somewhere between WP20 and WP22 (the home point).
I also played around with the speeds and came to the same conclusion that it might have had a forced landing near the home point in case the drone really tried to complete the mission with the 11.2 km/h from waypoint 10. But usually I regained signal around waypoint 19 and 20 on the previous missions. I also searched this area already though. Might go on another walk along the waypoint track next days. The snow melted now and some wind kicked in, maybe it fell off of some tree now.
Is it actually a thing that when “Enable DJI’s Gimbal Interpolation in Waypoint mode” is enabled, the Spark might not correctly adjust speed for different waypoints when out of signal range? Before I enabled this option I never had a warning before I took off, saying something like “beware you manually adjusted speed for some waypooints”, even though I manually adjusted speeds for different waypoints before.
No.
Gimbal Interpolation is a setting you can turn on and off and works for all GO(4) drones.
Custom speeds ONLY works for GO(4) drones when supported by the drone’s firmware, that’s why you always get a warning.
I use Litchi since 2016 and this warning has always been there.
Perhaps you never noticed it before.