I am looking for someone or some people to test something for me. You would need to have any one of the following DJI Fly drones with waypoint support (which I do not have):
- Mavic 3 (any model)
- Air 3
- Mini 4 Pro
Ideally, you would also be familiar with my Litchi utilities.
Background
With Litchi, one is able to configure multiple camera actions (up to 15) at any waypoint. In DJI Fly, one is only able to add one and only one camera action at a waypoint (correct me if I am wrong about that). However, the WPML code does support multiple actions at any waypoint.
What I want to test is to convert a Litchi mission containing waypoints with multiple camera actions configured, into a DJI Fly waypoint mission and see how the drone handles those multiple camera actions at a single waypoint.
Specific Request
If you would like to help me, here is what I would like you to try:
- Create a two-waypoint Litchi mission.
- Use my “Litchi Mission to Panorama Mission” converter to convert that to a panorama mission.
- Use my “Litchi Mission to DJI Fly Waypoints” converter to convert that to a DJI Fly KMZ file.
- Load that KMZ file to your flying device and fly the mission paying particular attention to how it handles the multiple “Take Photo” requests at the waypoints of the first panorama.
What I would like to know includes:
- Does it take a series of 8 + 8 + 5 + 1 photos at the first panorama location?
- Are the photos taken at the proper headings and pitches allowing them to be stitched together?
- Any anomalies?
This testing is probably best done by someone who has already successfully used my utilities to create panoramas and to convert and load waypoint missions.
1 Like
Wes, what is sure it does not work. I can’t remember how many photos it take but the only way I’ve found with my tests on Mini4Pro is like that: (photo-move-back&photo-move-etc…) because DJI Fly don’t want 2 actions in a WP
I can test it tomorrow between 2 showers if you like.
If you could possibly tell me if it tries to take multiple photos at one waypoint or if it continues to take photos as it moves away from that waypoint, or does it simply take one photo and then moves on. Knowing the exact behavior might help me figure out if there is any way to tweak the WPML code to make it work.
Also, does DJI Fly allow you to have consecutive waypoints with the exact same coordinates or do they have to be spaced apart at least 0.6 m like Litchi requires?
I put in my script (Modif_lat = 0.000005) otherwise it does nothing.
I will test tomorrow (it’s 20h20 in France) simply with 2WP and your Utilities and will ScreenRecord to show you …
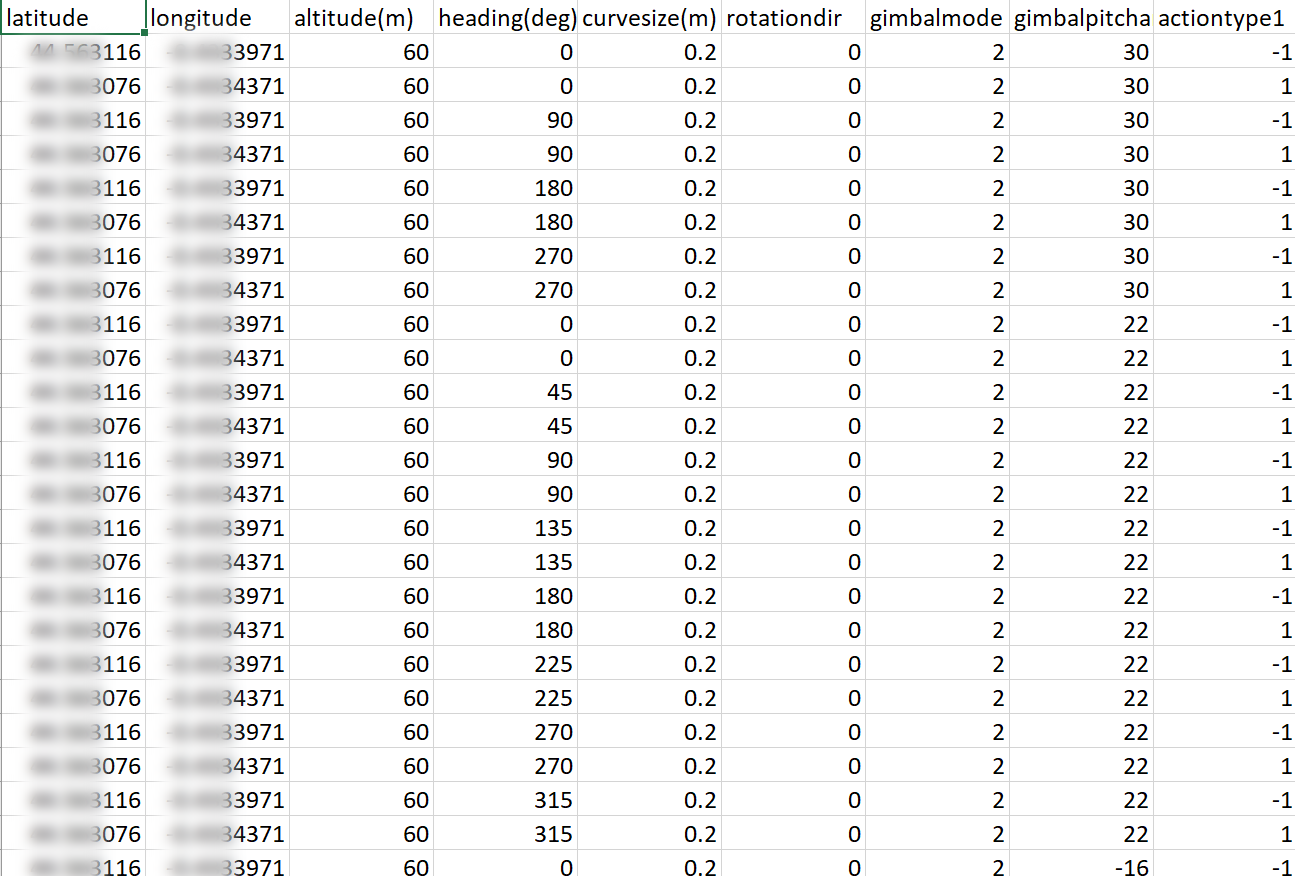
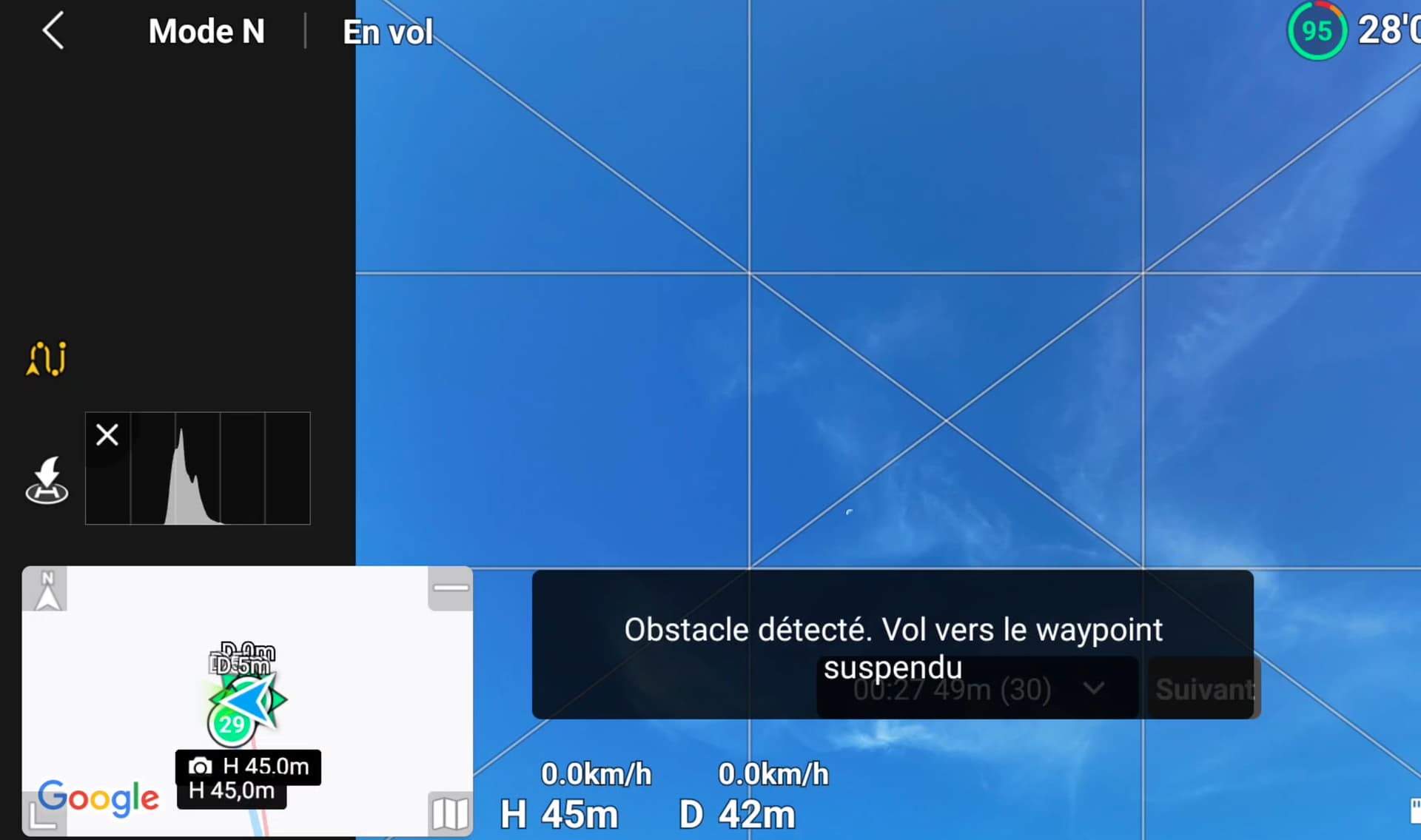
With Mini 4 Pro you can also put the gimbalpitch to 58 max (is what I do instead of the 30) modifying csv before your Litchi to DJI Fly but not more because I don’t know why if you put 60, DJI Fly think there is an obstacle and there is this message (in FR) :
Wes, 6 photos. Video & all csv & captures in PM.
Fyi, fwiw, With mavic 3[pro] Fly app missions have been able to “stack” waypoints, it’s not as clean as litchi where u can input decimal lat lon, however zoom in and can stack. For example start wpt 1 action start record, goto wpt2, action stop rec, wpt3 same location action take photo, wpt 4 same location start record, go to way 5, stop rec. It’s too bad dji does not support multi action per wpt or edit a number for wpt location, even more too bad dji does not release sdk so we can just litchi :). Hope that helps. Oh btw, fwiw, playing with wpt lines in Fly app missions can remove some of the curve however not all.
I have an Air 3.
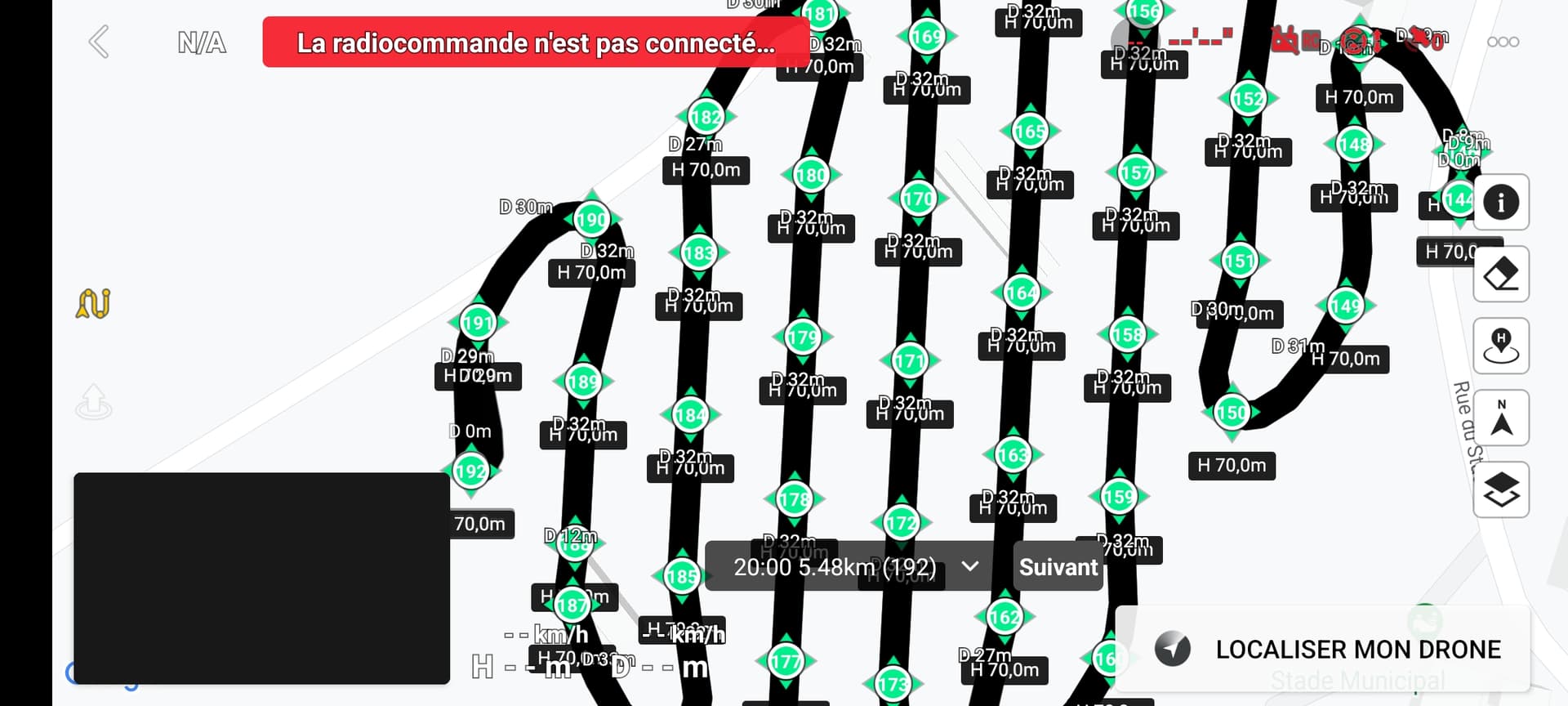
I would like to test the waypoint support. And I already used your utility to transfer the Litchi to DJI Fly waypoint and that works. Unfortunately, the routes flown are not straight but curved, intended more for video recordings rather than for taking photos.
While Litchi does support either straight lines or curved turns, it appears that DJI’s implementation of waypoints only supports curved turns. What is odd is that the language that DJI is using (WPML), does allow one to specify either straight lines or curved turns. However, when set to straight lines, DJI Fly cannot display the mission properly.
When using my utility to convert a mission to DJI Fly, you should see warning about straight lines if you mission contains any.
Playing with waypoints you can have nearly straight lines and I do regular mapping.
It’s true that a warning comes up regarding straight lines not being supported.
Do you know if this works with the RC2?
Yes, you can convert and upload waypoint missions to the RC2.