I am using a DJI mini 2 to fly relatively short, single line transects at an altitude of 10m (low I know, but I am trying to monitor the growth of seedlings). The initial flight test had it flying straight towards the hillside, and never attempted to increase in elevation at all. This was with the online elevation.
When I went back and exported the mission as a VLM, it shows it is just a flat path “10m” above the ground. The KLM 3D path shows it following a somewhat correct elevation but not quite at the altitude I want. I was doing this all on the online mission hub. I redownloaded the desktop version, added a high resolution DEM, and the KML from that seems pretty accurate. When saved and open it with the DEM on the online hub, the elevations seem to match.
Here are my main issues:
The exported VLM from the online hub is still showing a flat path in Google Earth.
The exported KML from online and from the desktop app are slightly different.
How do I know in the phone app whether or not Litchi is using the elevation data I gave it?
The variability between the different exports, from the two different locations makes me unsure which flight path/elevation the drone is going to run with when I am out in the field.
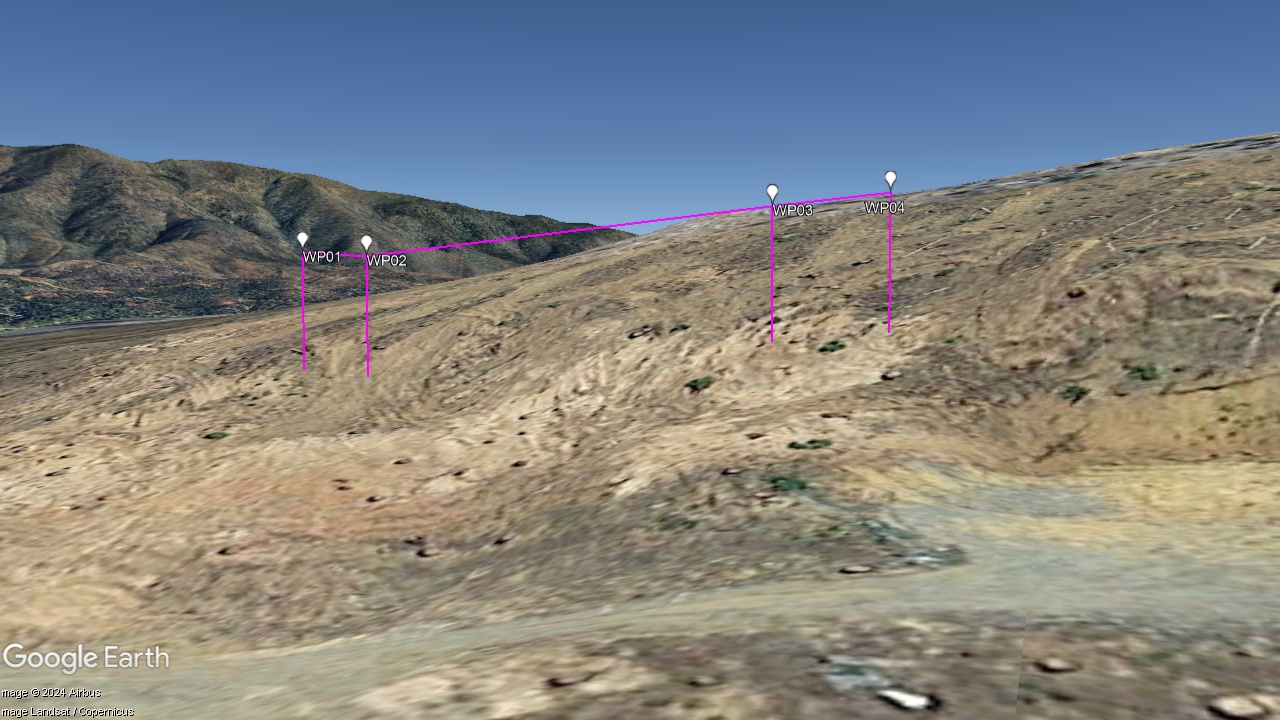
Here is what the three different paths look like. Pink is the most accurate from the desktop app.
This is normal. The exported KML file stores absolute height. The heights would have been computed using whatever elevation model Litchi uses. When you use VLM to send a mission to Google Earth Pro, the elevations in the file come from the Google Elevation API. Litchi’s model and Google’s model are similar but different. Sometimes Litchi’s model is more accurate. Sometimes Google’s model is more accurate.
If you had checked the “Above Ground” option in Litchi’s Mission Hub, the Litchi app will show two elevations by each waypoint. In your case, it would have shown something like “10(1200)” where “10” is your chosen above ground height and “1200” would be whatever the elevation is below that waypoint plus the above ground height. I just guessed at the “1200”. I don’t know where you are flying or what the ground elevation is.
The drone’s height will be based on Litchi’s elevation model.
If you wish to have more details about this mission you would have to share it by unchecking the “Private” checkbox and then posting the URL here.
Thanks for the reply! On my Litchi phone app it just shows the altitude relative to the first point (10(10) or 10(12)) and not the above ground elevation. And when you say that the drone’s height will be based on Litchi’s elevation model, does that mean it will be using the DEM data that I provided? Litchi’s (and google earth’s) model uses a 30m DEM and given that these transects are 30m, I need the .5m data that I have to account for more subtle changes in the elevation. I am still not sure why the exported VLM shows a flat path in Google Earth, unlike the exported KML. I appreciate the help.
Depending on the CRS you have there might be big (absolute) differences to WGS84 elevation.
Litchi is only looking at the relative differences though, so likely this is not a problem.
I had the problem once that litchi would not use the correct elevation, but the problem was that i sent the csv flightplan to an other user, that did not have the DEM stored on his account but this also doesn’t seem the issue here.
Did litchi accept the DEM? (Was it in the correct format? Did you see it on the map?) If there’s not too many waypoints, you could have litchi calculate the differences in elevation and copy the values in the brackets to use them as “absolute” elevations at that waypoint.
I didn’t download any from the site you mentioned but I did a test using a DEM file from some previous work. I found that with the same mission and the “Above ground” option checked, different height values are displayed in Litchi’s Mission Hub and the Litchi app without the DEM loaded vs with the DEM loaded. So, my conclusion is that the heights at which your drone will fly is affected by the DEM you have loaded.
The altitudes displayed in the phone app will always show the relative heights above take-off / waypoint 1. The assumption is that you are taking of from the same ground elevation as the ground under waypoint 1.
Litchi accepted the DEM (as a .asc file) in both the online hub and the desktop app. The main issue is that with or without the DEM, the VLM file export still shows it as a flat path in google earth, but the KML reflects the changes in elevation.
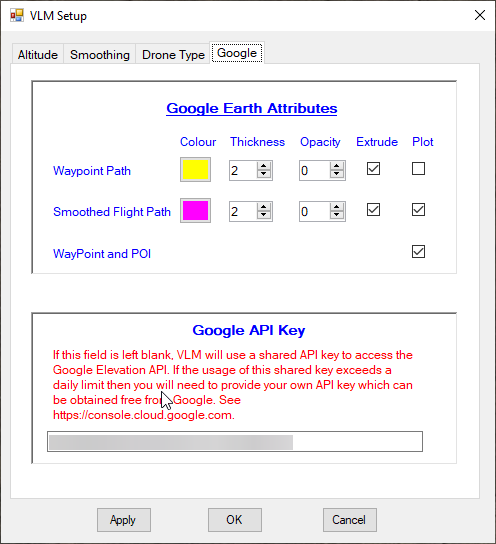
Without seeing your mission I can only guess. Are you providing your own Google Maps API key in VLM? It is near the end of the month. If you are depending on the shared API key, it may be over quota for this month.
To make the mission public, uncheck the Private box, open the mission, then copy the link and paste it here.
The link will look like:
https :// flylitchi .com /hub?m=Ifj38Cje
(I made up this link and put spaces to make it visible)