Using the new Litchi Hub, I created an “area mapping” mission, with the velocity at ~14 mph and the photo intervals set at ~86 feet.
I have not added or edited any waypoints, with my phone, or with the old Mission Hub website.
After running it. I observed that occasionally, when reaching a waypoint, the drone is capturing a photo while it is still yawing to a new heading, causing the photo to be blurred.
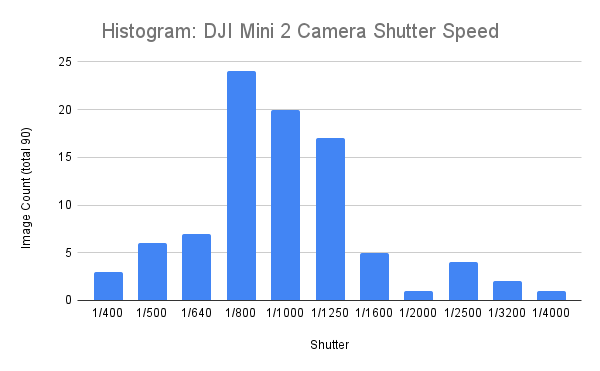
If some of your photos are blurred, I’m curious what your shutter speed is. It should be up around 1/1000 s.
Do you have an ND filter on your camera? If so, remove it. Its only purpose is to introduce motion blur which is something you don’t want for mapping missions.
I have my DJI Mini 2 drone camera set in “auto” mode, and I am not using my ND filters. Some images are captured at 1/400, 1/500, 1/640, and 1/800.
I used the Windows File Explorer to add an exposure column for each image, then snipped the entire exposure column, then opened the snipped image in Photos, then captured the text, imported it to Google Sheets, and graphed it as a Histogram.
It sounds like you are doing everything correctly. I’ve heard of people using an ND filter during mapping missions so I had to ask.
Another thing to consider… When doing mapping missions, I prefer to keep the drone facing in the same direction so that all photos are aligned the same way. You could try setting the “Heading Mode” to “Initial”. That way, the drone won’t try to yaw (rotate) at the boundaries of the mapping area.
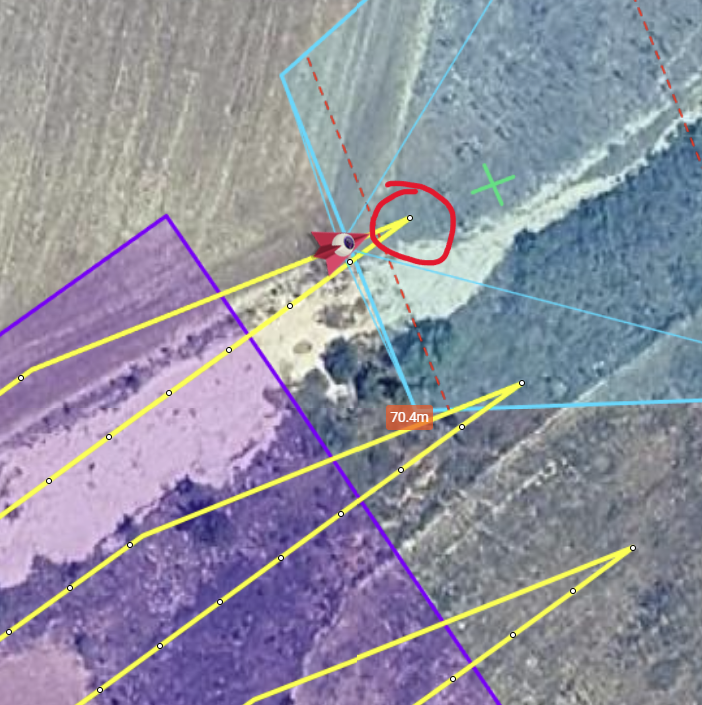
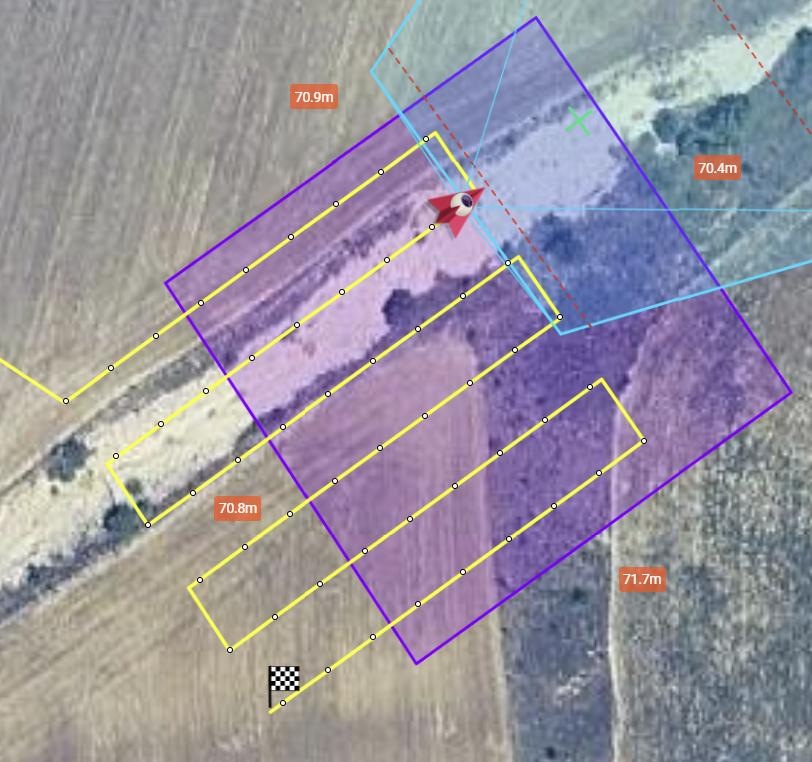
I’m not sure if this is related to the same issue, but while planning a mission with Litchi Hub I noticed that, at the last waypoint of the path, the drone takes the picture before rotating to the correct angle. As a result, the image is taken in the wrong direction, facing forward instead of toward the intended side.
How can you tell that the drone takes a picture in the wrong direction while planning the mission? Or, have you flown this mission and found that the picture is taken in the wrong direction?
Exactly, I’ve flown the mission and I noticed that the picture is taken in the wrong direction. It takes the photo first and then rotates. I am using the DJI Mini 5 Pro with KMZ files transferred to the controller.
This may be a limitation of DJI’s implementation of waypoints. The WPML language does support multiple actions at a waypoint (rotate drone, take a photo, etc.) either in parallel or sequential. However, DJI’s implementation of waypoints only allows for one action at a waypoint. If multiple actions are configured, the drone may attempt to perform them simultaneously (in parallel). My tests using the “sequential” option always results in those actions being performed simultaneously.
I was thinking that maybe the behavoiur is correct because the drone takes the picture after reaching the waypoint. So because the heading of the waypoint is follow the line is normal. Maybe at that waypoint the drone snould have the heading of the next waypoint. In this case it will reach the waypoint after turing and thana take the piucture. But I don’t know if this is possible. Thank you.