I keep seeing these posts on social media where someone is showing a perspective view of their mission (as opposed to just the straight down view), where you can see the relative altitudes of the waypoints. How is this done?
Thanks
I keep seeing these posts on social media where someone is showing a perspective view of their mission (as opposed to just the straight down view), where you can see the relative altitudes of the waypoints. How is this done?
Thanks
@rubyfocus
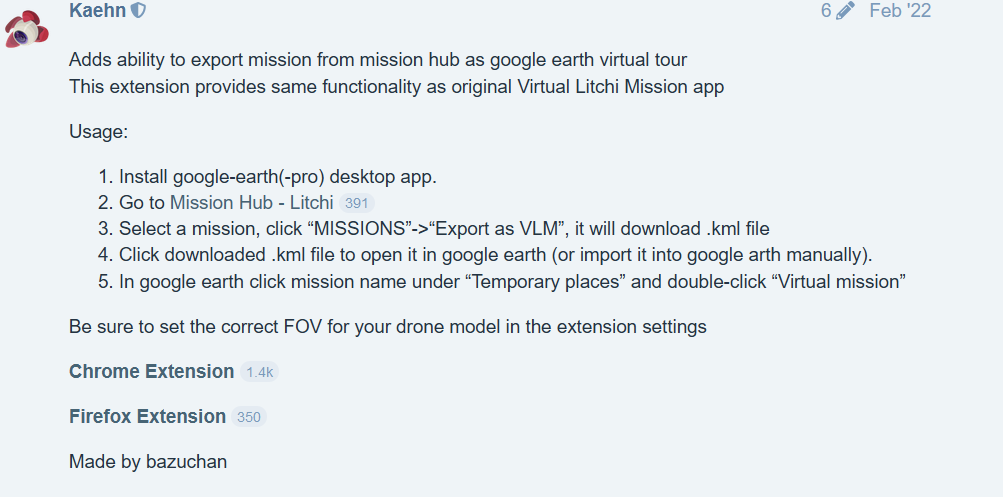
There are quite a few posts about Virtual Litchi Mission on here. In a nutshell, here is one:
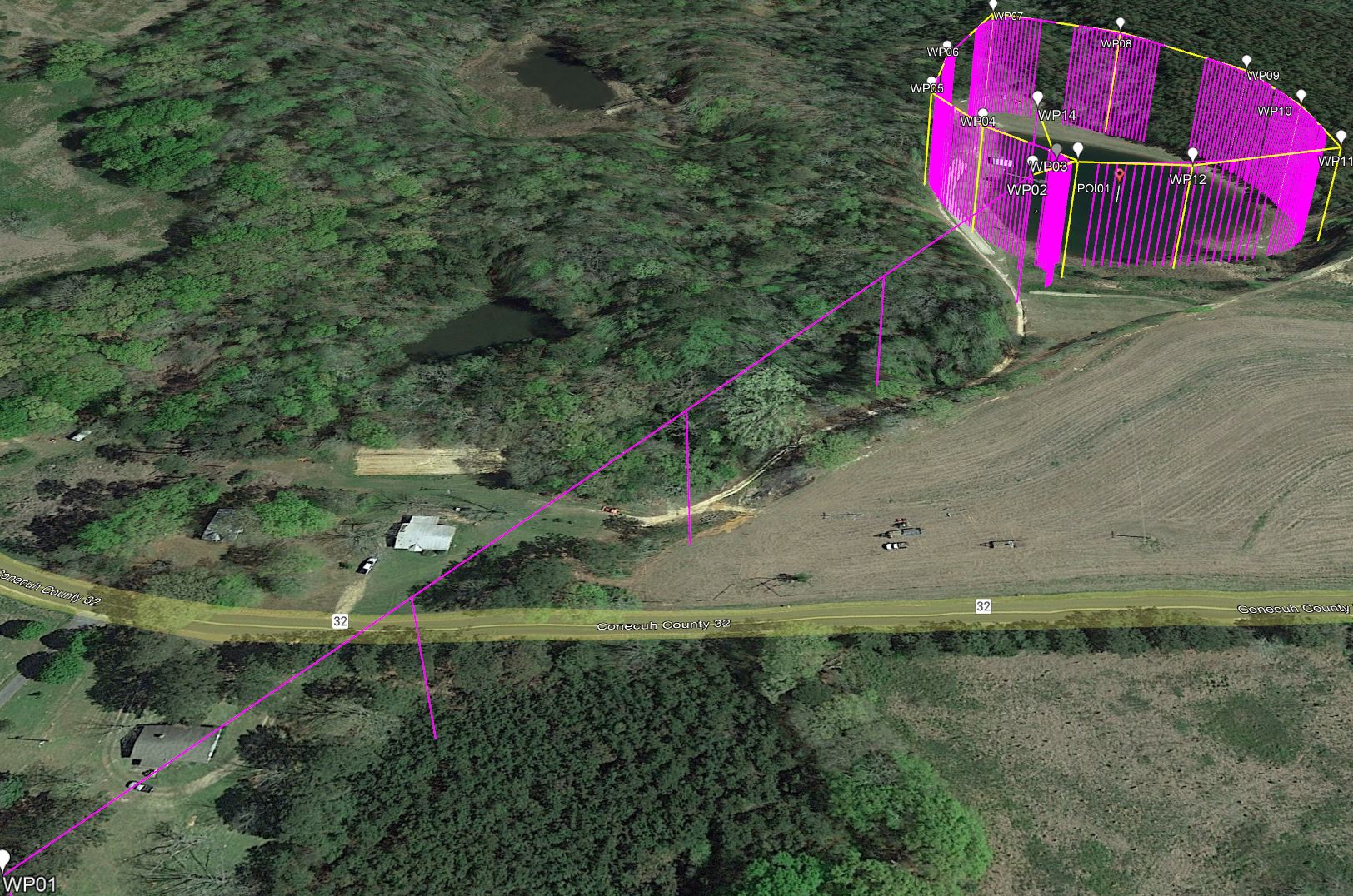
From the Mission Hub (website), Export as VLM, Import into Google Earth. Zoom, tilt, rotate, etc.
Somehow the VLM export extension to earth didn’t work well for me, the locations were (“of course”?) correct but the camera was pointing wildly wrong. What gives?
Please explain, and if possible share the mission
Hm .I haven’t checked for a while. My current check on the flight I’m most familiar with seems basically OK, whilst I would point out that the entire mission is focused on one POI so in a perfect render this POI would be unmovvable, dead center in the video output window, however it does bounce around.
But this really only is a quibble.
A more important one that I picked up already is that when flying straight over a POI, the drone will be super focused on the actual POI and at some point look straight down and then do a pretty rapid turn around when the POI is right behind. Earth Pro took MUCH longer and never even looked at the POI during this moment.
Effectively, I suspect the earth version will follow the waypoints very accurately but its tracking of the POIs is poor. No idea if this is VLM’s fault or earth or both…
This may be due to the locations of your waypoints in relation to the POI. It’s not clear from what you wrote if this is happening in Google Earth or in the actual, flown mission.
We would need to see your mission to troubleshoot what is happening. If you choose to share it, uncheck the “Private” checkbox and then post the URL here.
Sure, take a look at this one: Mission Hub - Litchi
I’m sure the drone would fly straight across the tower and not let its eye off the center of it, but in earth the camera drifts wildly away and it’s as if it was roughly pointed at POI 2 (that I created but as an illustration, but not used in any of the waypoints)
seems ok here, I wouldn’t try flying that in real life, I think you’d soon have a crowd of the boys in blue around you 
It appears that the drone is rotating toward the next waypoint heading, like you would expect it to do based on the headings of the 2 waypoints. That rotation causes the camera view to look ‘off to the side’
If you insert a Waypoint #2 in the middle (over the tower) the camera points down toward the tower. I think thats your intention.
It flies as expected for me in Google Earth Pro. At the midpoint of the mission, the heading would be: (269+98)/2 = 183.5 degrees and the gimbal pitch would be: (42+53)/2 = 47.5 degrees. That is what I’m seeing at the midpoint:
To be clear - this is what actually happens if you pass over a waypoint.

Again, I don’t know if this is easily implementable in Earth but to mimic what the drone actually does as exactly as possible, the POi needs to be kept strongly in center view, and at some point the drone effectively looks completely straight down.
In my big ben example that I posted, it does not.
By adding the middle waypoint that I mentioned, the mission flies like this.
Tweaks would be …
Thanks Sam but no, that’s not what’s happening, as I said I specifically have all POIs lined up properly.
Please compare:

and
There’s a subtle difference between the two… ![]()
I agree, there is a ‘subtle’ difference between the two.
Are both videos created from the same mission? One simulated and one actual?
If so, I am at a loss.
Yep both exact same mission.
Above my limited expertise. Sorry
I’m just a user like you. No affiliation with Litchi
The Litchi mission you shared is not the same as the mission shown in the video. This makes it more difficult for us to troubleshoot. The Litchi mission you shared behaves as expected when viewed in Google Earth Pro.
I think I know what is happening (but I really need to see the mission). In the Google Earth Pro movie, both the heading and the gimbal patch appear to be interpolating smoothly from what is defined at waypoints 1 and 2. This explains why it does not point the camera down at a point between the two waypoints. There is nothing to cause the camera to point down. This is the expected behavior.
The only way the gimbal will point down at a point midway between your two waypoints is if you have one and only one POI in your mission and it also depends on your drone. I don’t know if you have said what drone you are using to fly this mission. My guess is that you are using an older one (pre Air 1).
With drones that have on-board waypoints and only one POI in the mission, geometry is used to track the POI. Newer drones or missions with more than one POI use simple interpolation of headings and gimbal pitch angles to position the camera.
Share your mission and what drone you are using and I can be more specific.
Sent you a private message on your site with details since I prefer not to share too publicly 
Drone is the DJI Mini 2 - and no I don’t think you are correct, as you can see from my real video the camera is absolutely pointing down and quickly flips around the POI once we’re passing it.
My ‘big ben’ demo only has the extra POI for me to illustrate where I think the camera is pointing but none of the waypoints is referring to the extra POI
Either way you have the original now so feel free to disregard my sample
I’ve had a look at your Litchi mission (the real one). This mission is comprised of four waypoints and two POIs. Therefore, Virtual Litchi Mission (the Windows application, not the Chrome browser extension) will take the parameters at each waypoint (heading and gimbal pitch) and smoothly interpolate those values as the drone travels from one waypoint to the next. For example, if the gimbal pitch is -20 degress and one waypoint and -30 degrees at the next, at a point midway between the two waypoints the gimbal pitch angle will be -25 degrees. The heading is treated in a similar manner.
If (and only if) your mission has a single POI AND all waypoints are configured to point at that POI AND your are flying the mission with a drone that has on-board waypoints, the mission will be flown in “Hotpoint Mode”. In “Hotpoint Mode”, geometry is used to compute the location of the POI in relation to all points on the flight path. Doing so allows the drone to truly track the POI as it flies the mission.
I do not use the Chrome VLM extension and I do not know how that handles this situation.
The DJI Mini 2 did not exist when the VLM Windows application was modified to match what is described above. So, I cannot say how Litchi handles this situation. From the video you posted, it appears to actually track the POI.
For your reference, here are some posts made by the author of VLM (Windows application) where he explains in more detail how VLM treats waypoints and POIs and what “Hotpoint Mode” is.
https://mavicpilots.com/threads/virtual-litchi-mission.31109/page-51#post-1404171
Yep, I guess the final point is simply that VLM currently doesn’t quite match what the drone does, my “flyover” example being one. It’s certainly still interesting but it’s not great for getting accurate “preview” videos